Виды усилителей рулевого управления
 В зависимости от типа конструкции выделяют несколько разновидностей систем рулевого управления.
В зависимости от типа конструкции выделяют несколько разновидностей систем рулевого управления.
Реечная. Является самым распространенным типом. Энергия с руля на колеса передается с помощью специальной рейки, которая расположена в поперечной плоскости по отношению к раме и кузову транспортного средства (отсюда и название). Это очень простая, но в то же время чрезвычайно эффективная конструкция, обеспечивающая хорошую передачу поворотного усилия. Имеет ряд недостатков, главный из которых – чувствительность к ударам, возникающим из-за неровностей дорожного покрытия. По этой причине плохо подходит для эксплуатации во время передвижения по пересеченной местности.

Червячная. Как понятно из названия, этот тип системы использует червячную передачу. Она представляет собой совокупность вала с нанесенными на него канавками и зубчатой шестерни. Зубцы последней входят в канавки вала. Таким образом, при повороте вала поворачивается и шестерня. Червяная конструкция имеет целый ряд плюсов – она менее чувствительна к ударам, в отличие от реечной, самостоятельно тормозит поворот, что избавляет автомобилиста от постоянного контроля руля. Главный недостаток этой разновидности – низкий КПД.

Винтовая. Напоминает червячную. Однако вместо вала и шестерни в данном случае используются винт и рейка с винтовой резьбой. При этом полости между деталями заполнены шариками, напоминающими подшипниковыми. В общих чертах принцип действия этой конструкции напоминает схему работы червячной передачи. Однако она имеет ряд преимуществ по сравнению с последней. Основное из них – более высокий КПД. В качестве недостатка подобной конструкции можно назвать ее относительную сложность – в случае износа одного из шариков замену ему придется подбирать точно по диаметру, а это удается не всегда с первого раза. В противном случае возникнет повышенное трение и механизм не будет нормально функционировать. Чаще всего устанавливается на большегрузные автомобили, хотя иногда встречается и на легковых.
 В зависимости от наличия усиления системы делят на 4 основных разновидности.
В зависимости от наличия усиления системы делят на 4 основных разновидности.
- Без усилителя. В данном случае устройство, делающее поворотное усилие более интенсивным, отсутствует полностью.
- С гидроусилителем. В подобных системах стоит гидравлический усилитель, который работает за счет жидкости под давлением. Является самой распространенной на сегодняшний день разновидностью.
- С электроусилителем. Поворотное усилие делается более интенсивным благодаря электрическим двигателям, которые питаются от бортовой электросети транспортного средства.
- Гибридные схемы. Как правило, сочетают в себе гидравлическое и электрическое усиление.
В зависимости от наличия дополнительных систем узел делят на следующие разновидности.
- AFS (или с активным рулевым управлением). Суть системы в том, что она подразумевает наличие датчика, который передает информацию о передаточном усилии на ЭБУ. После обработки этих сведений блок управления или увеличивает, или уменьшает усилие в автоматическом режиме. В конструкции присутствует планетарный редуктор.
- С динамическим управлением. Принцип работы аналогичен AFS, но вместо планетарного редуктора в данном случае используются электрические двигатели, которые и отвечают за увеличение усилия, передаваемого на колеса.
- С адаптивным управлением. Суть системы в том, что руль не имеет плотной связи с колесами. К нему подключен датчик, связанный с ЭБУ. При повороте он отправляет на блок соответствующий сигнал, а тот, в свою очередь, заставляет поворачиваться колеса. ЭБУ при этом в автоматическом режиме на основе показаний датчиков определяет, какое усилие необходимо применить для выполнения поворота.
Общее устройство автомобиля
Конструкция автомобиля не так уж и сложна, как может показаться на первый взгляд. Совершенно любое транспортное средство состоит из пяти основных частей – мотор, ходовая часть, трансмиссия, кузов, электрооборудование и система управления.
Мотор
Двигатель – сердце автомобиля, задачей которого является преобразование тепловой энергии (сгоревшего топлива) в энергию механическую. После чего она передается через трансмиссию на колеса.
Ходовая часть
Множественные узлы и агрегаты, заставляющие автомобиль двигаться, относят к ходовой части – мосты, колеса и подвеска (задняя и передняя).
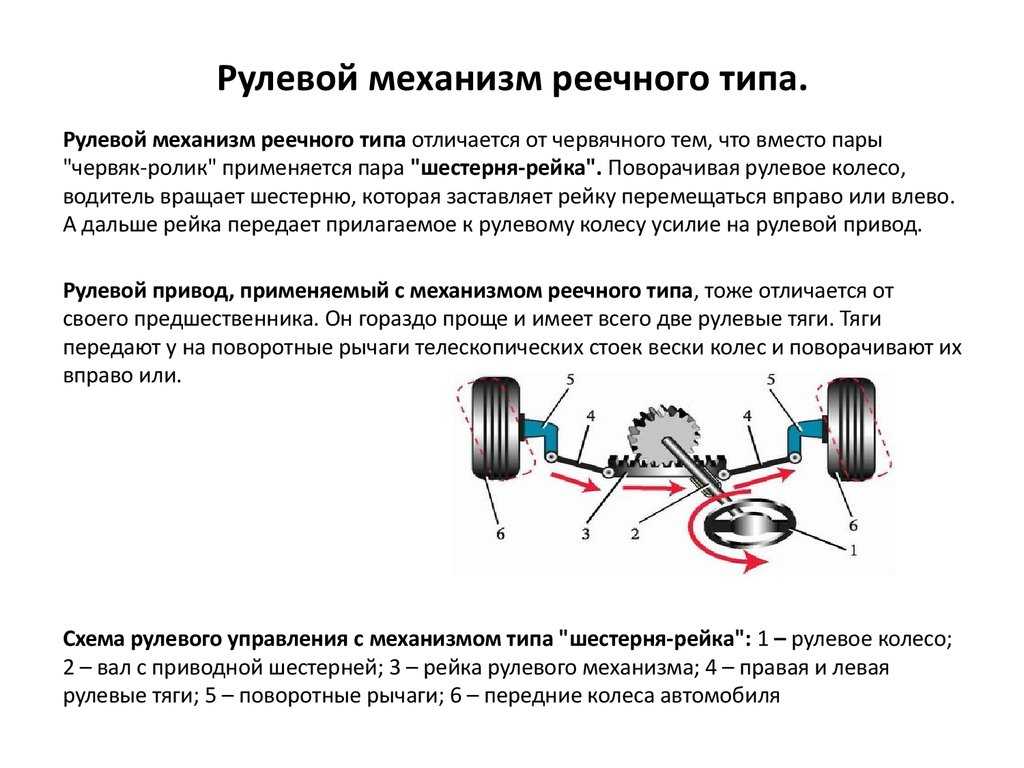
Принцип работы рулевого управления
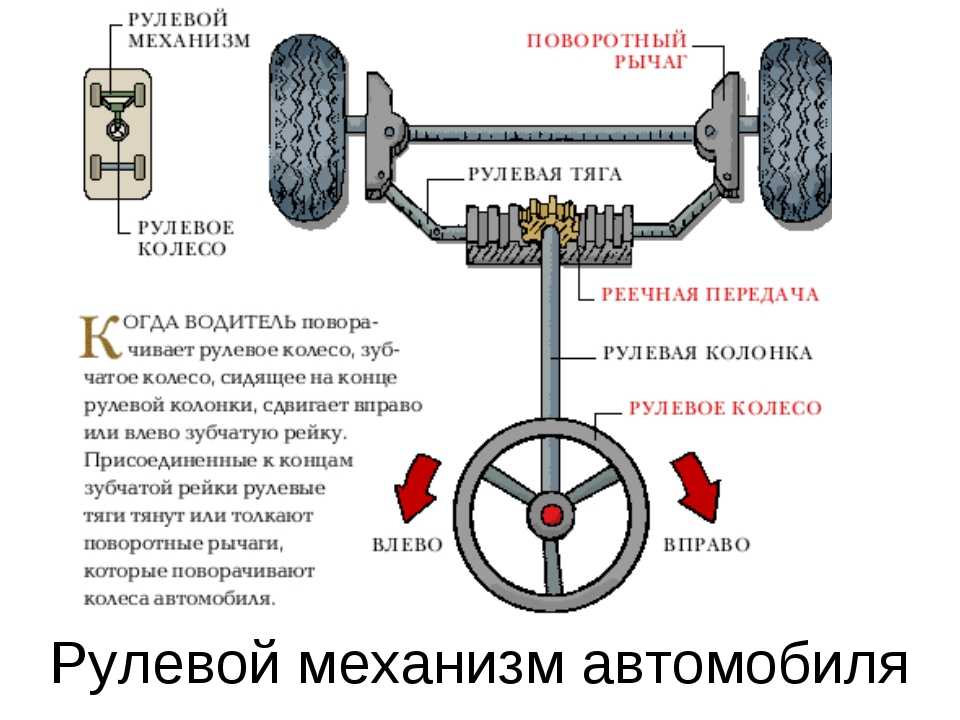
Для примера возьмем ситуацию, при которой водителю необходимо повернуть налево.
Вращение руля влево валом колонки передается на шестерню, и она тоже вращается в ту же сторону. За счет зубчатого зацепления шестеренка смещает рейку вправо.
Сдвигаясь, рейка тянет левую рулевую тягу, из-за чего амортизационная стойка или ступица проворачивается вокруг оси влево, обеспечивая поворот левого колеса в нужную сторону.
Одновременно рейка толкает правую рулевую тягу, что приводит к повороту правого колеса влево. В результате колеса управляемой оси поворачиваются синхронно, но угол поворота у них разный, что исключает скольжение колес при маневре.
Разница углов поворота обеспечивается заданием установочных углов (развала и схождения) управляемым колесам.
Усилители
Рулевое управление автомобилей сейчас комплектуется усилителями, обеспечивающими повышение усилия, прикладываемого водителем к рулю.
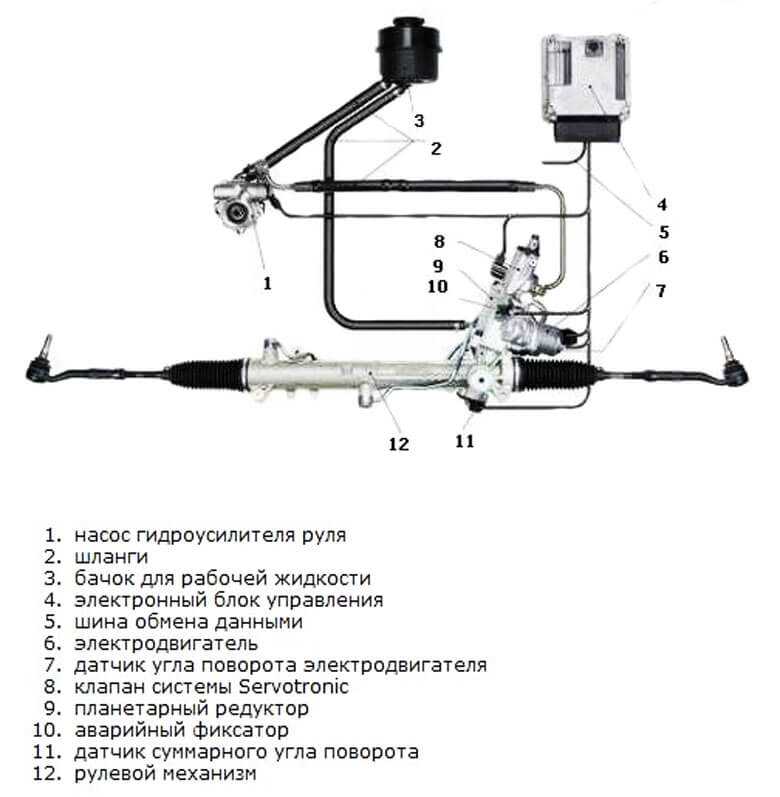
Наибольшее распространение получили усилители гидравлического и электрического типов.
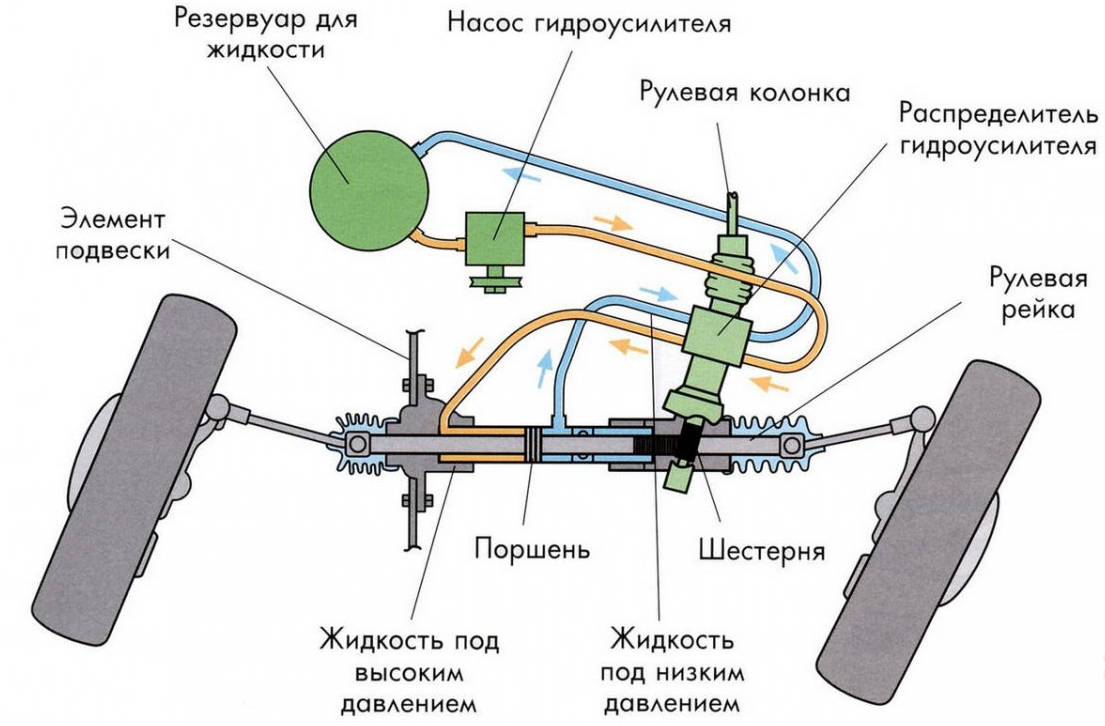
В первом варианте дополнительное усилие создается за счет давления жидкости, нагнетание которой выполняется специальным насосом. Особенностью конструкции гидроусилителя является использование рулевого механизма в качестве гидравлического силового цилиндра (корпус выполняет роль цилиндра, а рейка – поршня).
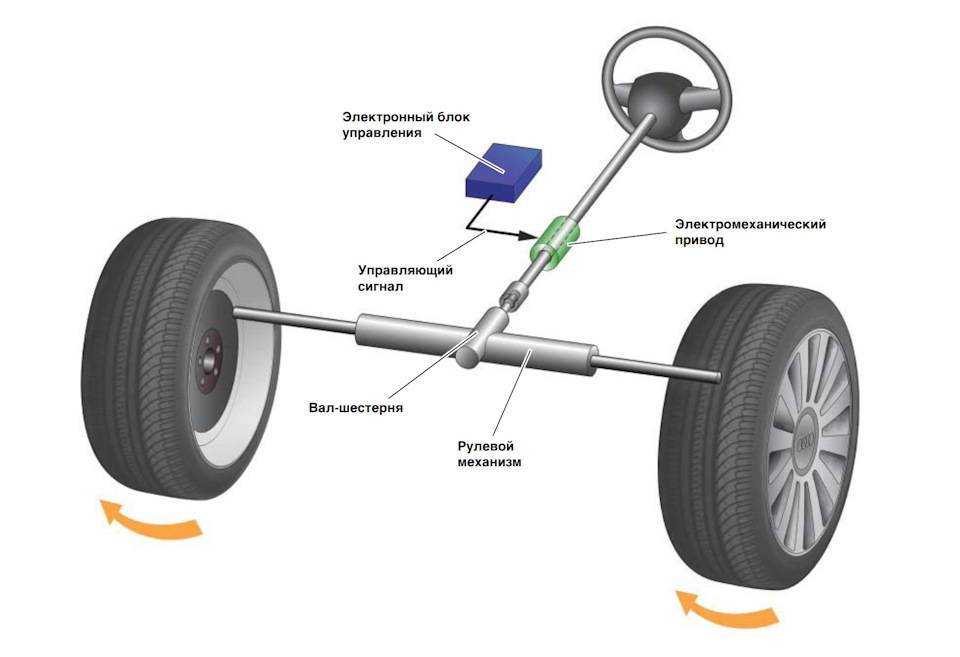
В электрическом усилителе дополнительно усилие создается электродвигателем с редуктором. На автомобилях используется два типа электроусилителей – располагаемых на колонке и воздействующих на ее вал, а также входящие в конструкцию механизма (взаимодействует с рейкой).
Рулевой привод с зависимой подвеской автомобиля
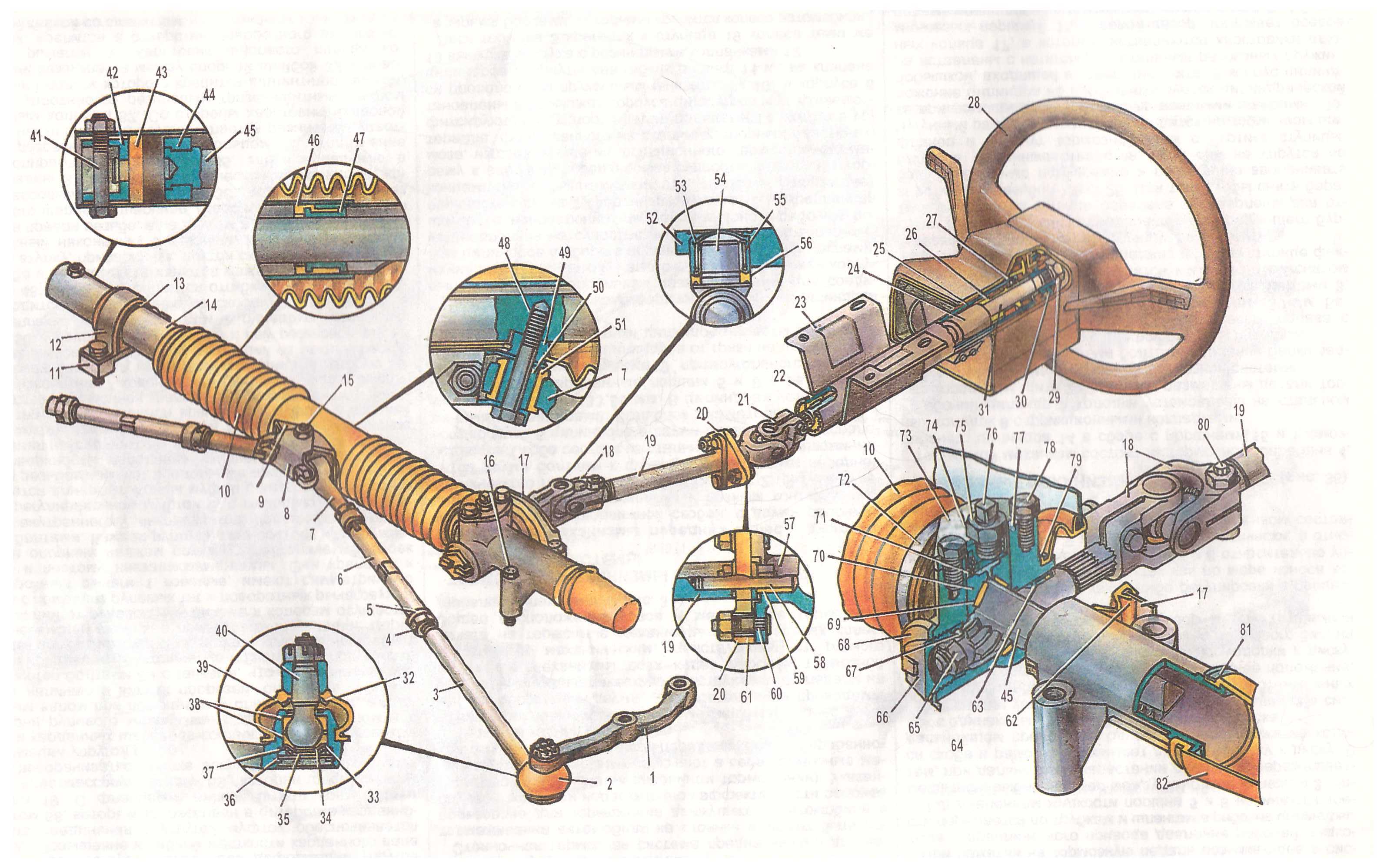
Рулевой привод грузовых автомобилей с зависимой подвеской включает в себя: сошку, продольную тягу, два левых поворотных рычага, поперечную тягу, правый поворотный рычаг, рулевую трапецию (шарнирный четырехугольник, образованный средней частью балки передней оси, поперечной тягой и левым и правым поворотными рычагами). При движении автомобиля по неровной дороге на детали рулевого привода (сошку, продольную и поперечную рулевые тяги, рулевые рычаги) действуют большие нагрузки. Поэтому в рулевой привод вводят пружины для смягчения толчков и для автоматического устранения зазоров, возникающих при изнашивании деталей. Поперечная рулевая тяга на одном конце имеет левую резьбу и правую на другом для навинчивания наконечников крепления шаровых шарниров. Вследствие этого можно изменять расстояние между шарнирами при регулировании схождения управляемых колес.
Подключаемый полный привод (part-time 4wd)
Данная система предполагает передвижение в обычных условиях в “недоприводном” режиме (т.е. с приводом только на передние или только на задние колеса) и включение полного привода только тогда, когда в нем действительно возникла необходимость – в грязи, в снегу, на льду, при движении по сильно пересеченной местности. Хрестоматийными представителями машин с системой подключаемого полного привода является отечественный УАЗ (вся линейка), Nissan Patrol, Mitsubishi Pajero, Suzuki Jimny, большинство компактных пикапов итд. Классический part-time привод подразумевает включение полного привода вручную, когда водитель понимает, что в нем есть необходимость. Классический pert-time с ручным подключением полного привода не имеет межосевого дифференциала и ориентирован на использование в условиях бездорожья и невысокие скорости. Использование подобного типа привода на сухих покрытиях опасно, поскольку значительно снижает управляемость машины (особенно на поворотах) и создает значительные нагрузки на трансмиссию (т.н. “циркуляция мощности”), что ведет к ускоренному ее износу.
Дорожная обстановка часто складывается таким образом, что водитель не всегда может верно оценить ситуацию и своевременно переключиться в полноприводный режим. Развитие микропроцессорной техники и ее активное внедрение в автомобилестроение привело к возникновению трансмиссии с автоматически подключаемым полным приводом. Основная ее идея заключается в том, что электроника “следит” за дорожной ситуацией и автоматически задействует полный привод, когда он необходим, отключая его, как только такая необходимость исчезла.
Практически все современные кроссоверы и универсалы повышенной проходимости, а также вседорожники класса “люкс” имеют на вооружении систему подключаемого полного привода, управляемую электроникой.
Несмотря на всю привлекательность подобного решения оно имеет множество минусов. Полный привод, подразумевающий ручное подключение, как уже говорилось, не всегда может быть включен именно тогда, когда в нем действительно есть потребность. Здесь все зависит от опыта водителя, а опыт, как известно – сын ошибок трудных, и приобретается он либо после нескольких часов вытаскивания автомобиля из грязи или снега, либо (что печальнее) после ДТП, которого можно было избежать.
Главный же недостаток подключаемого привода, управляемого электроникой, заключается в том, что такая трансмиссия не рассчитана на длительную работу в полноприводном режиме. Это связано с конструктивными особенностями подобной системы и самой идеологией ее использования: подключить при возникновении опасной ситуации – выключить, как только опасность миновала. Элементы такой трансмиссии, отвечающие за передачу крутящего момента на подключаемые колеса, не рассчитаны на продолжительную эксплуатацию под нагрузкой (например несколько километров по глубокому снегу или грязи при активной пробуксовке).
В большинстве подобных систем применяются всевозможные вариации на тему многодисковой муфты – пакета дисков, прижимающихся друг к другу при активации полного привода и передающих крутящий момент на подключаемые колеса. При длительной работе под нагрузкой такие муфты сильно нагреваются, а при перегреве выходят из строя. Большая часть автоматических систем самостоятельно отключают полный привод, как только возникает опасность перегрева. Водитель в такой ситуации обнаруживает, что оказался в сложной ситуации без поддержки, на которую сильно рассчитывал. Особенно обидно, когда “умная” автоматика, спасая систему от перегрева, отключает вторые ведущие колеса в тот момент, когда останавливаться просто нельзя.
Особняком от перечисленных выше вариантов схемы part-time стоит трансмиссия SuperSelect, применяемая на автомобилях Mitsubishi Pajero и дорогих версиях пикапа L200, а также система Multi-Mode, применявшаяся в Toyota HiLux Surf и 4Runner. Эти трансмиссии позволяют двигаться как в “недоприводном” режиме для экономии топлива, так и в режиме постоянного полного привода без ущерба для управляемости и риска повредить трансмиссию. Фактически, это трансмиссия full-time 4wd, которую можно принудительно перевести в режим, при котором крутящий момент передается только на два колеса. Такие системы более сложны и дороги, чем традиционный part-time с ручным управлением и имеют в своем составе межосевой дифференциал, который может быть заблокирован при необходимости. На мой взгляд, это наилучшее из конструктивных решений трансмиссий part-time, которым может быть оснащен автомобиль для выездов подальше от цивилизации.
Устройство рулевого управления
Рассмотрим устройство рулевого управления колесных машин с управляемыми колесами. Конструктивно рулевое управление состоит из:
- рулевого механизма;
- усилителя;
- рулевого привода.
Компоновка рулевого управления грузового автомобиля с управляемыми колесами первой оси (КамАЗ, МАЗ) показана на рисунке. Использование регулируемых рулевых колонок позволяет менять угол наклона ступенчато, как правило, с шагом 5° в пределах до 40°. Рулевое управление с передними управляемыми колесами применяется у двух- и трехосных автомобилей. Компоновка и конструкция рулевого управления сравнительно просты и принципиально могут быть сведены к схемам, приведенным на рисунке.
На четырехосных автомобилях чаще всего устанавливают рулевое управление с поворотом колес первой и второй осей, первой и четвертой, либо всех осей.
Чтобы автомобиль мог двигаться в заданном водителем направлении нужно рулевое управление. В систему рулевого управления входит рулевой механизм и рулевой привод. В этой статье мы подробно разберем устройство рулевого управления автомобиля и его работу.








И так, рулевой механизм может быть червячным, реечным и активным. Рассмотрим их устройство и работу подробнее…
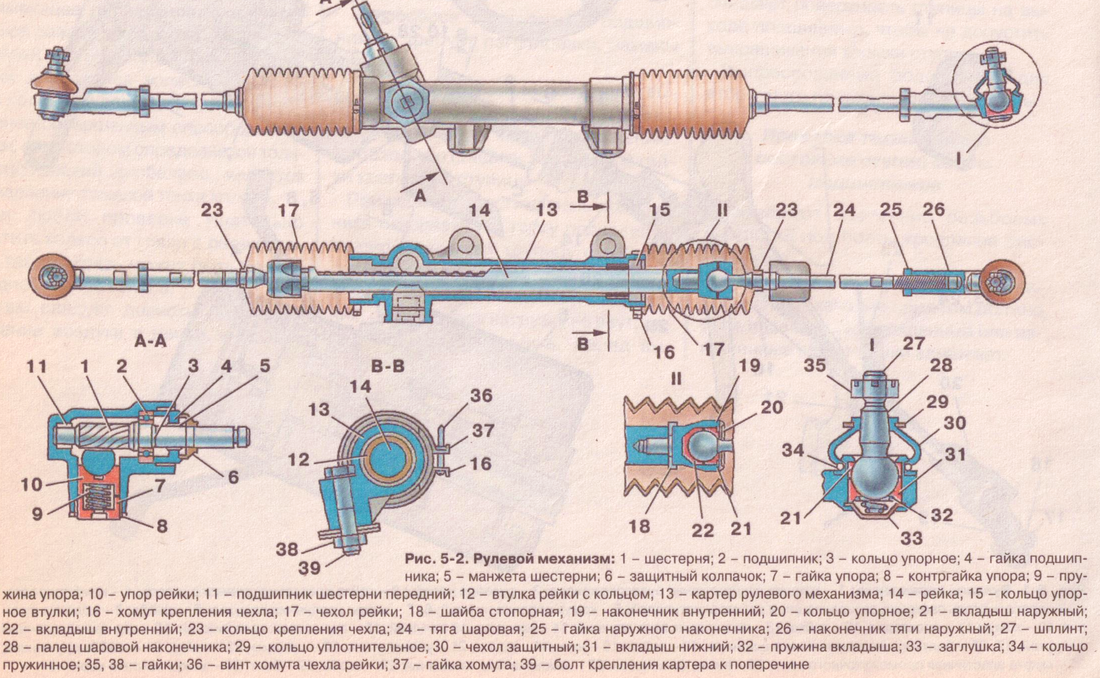
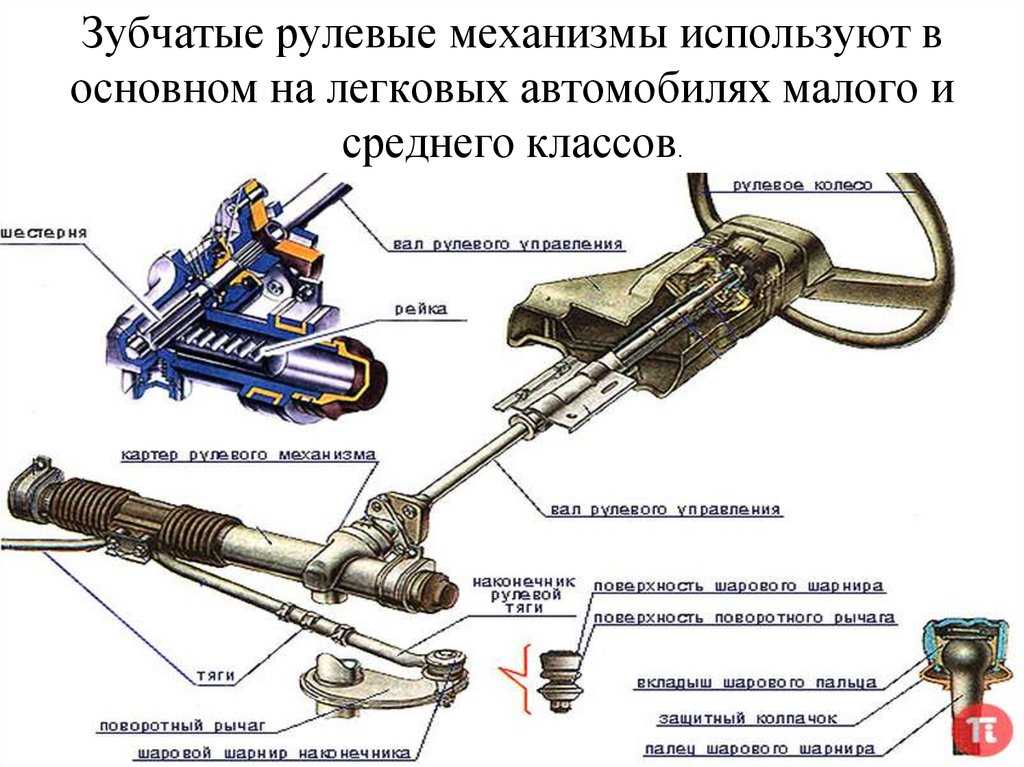
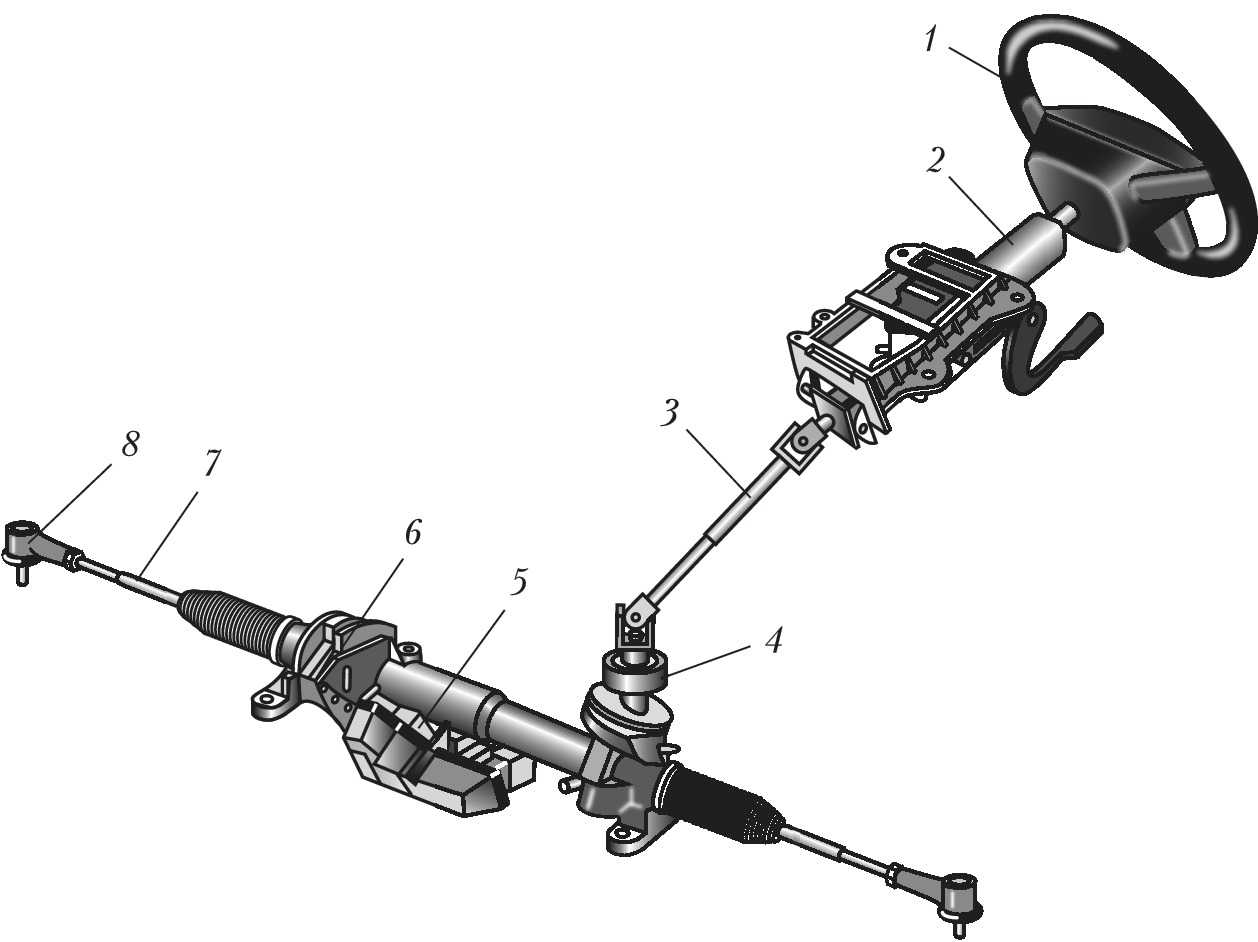
Устройство реечного рулевого механизма
Реечный рулевой механизм – самый распространенный в наши дни, и состоит он из:
- Рулевого колеса (руля);
- Рулевого вала;
- Рулевой рейки, являющейся узлом, состоящим из зубчатой рейки и приводимой в движение рулевой шестерней. Концы зубчатой рейки имеют резьбовые отверстия для крепления рулевых тяг.
- Рулевых тяг, являющихся металлическими стержнями, имеющими на одном конце резьбу, а на другом – шарнирное шаровое устройство с резьбой.
- Рулевого наконечника – корпуса с шаровым шарниром и внутренней резьбой, куда вкручиваются рулевые тяги.
И так, рулевое колесо вращается, передавая усилие на шестерню, приводящую в действие рулевую рейку, которая выезжает из корпуса вправо или влево и передает усилие на рулевой рычаг с наконечником, вставленным в ступицу, поворачиваемую им.
Чтобы свести на минимум усилия водителя при работе с рулем, реечное рулевое устройство имеет усилители руля. Поговорим о них подробнее…
Усилители руля
К усилителям руля относятся вспомогательные устройства для обеспечения его вращения. К типам усилителей относятся электроусилитель, гидроусилитель, пневмоусилитель и гидроэлектроусилитель.
Гидроэлектроусилитель имеет ту же систему, однако вращение насоса осуществляется электромотором.
Электроусилитель также оснащен электромотором, который соединен непосредственно с рулевым валом или рейкой, а управление происходит электронным блоком. Второе название электроусилителя – адаптивный усилитель, поскольку можно в зависимости от скорости движения авто прикладывать разные усилия к вращению руля. Яркий представитель такой системы – Servotronic.
Пневмоусилитель близок по строению с гидроусилителем, однако вместо жидкости используется сжатый воздух.
Устройство активной рулевой системы
В наше время активная рулевая система является самой продвинутой. Состоит она из:
- Рулевой рейки с планетарным механизмом и электродвигателем;
- Блока электронного управления;
- Рулевых тяг, наконечников;
- Рулевого колеса.
Рулевое колесо начитает вращаться, а с ним и планетарный механизм, приводящий в действие рейку, однако в зависимости от скорости движения передаточное число будет разным.
Солнечная шестерня снаружи вращается электродвигателем, и передаточное число будет меняться в зависимости от скорости вращения. На большой скорости даже небольшое движение руля может привести к плачевным последствиям, поэтому электромотор включается, вращает солнечную шестерню, и при повороте нужно будет больше довернуть руль. Если скорость маленькая, то вращение электродвигателя происходит в другую сторону, и управление автомобилем становится более комфортным.
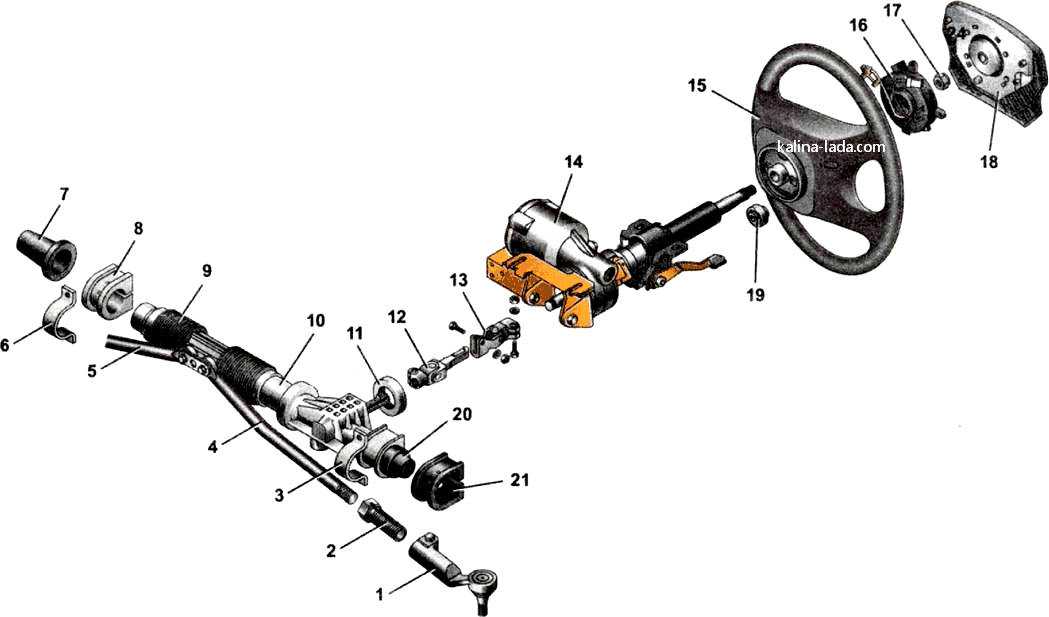
Устройство червячной рулевой системы
Червячная рулевая система состоит из:
- Руля;
- Рулевого вала с крестовиной – металлического стержня, с одной стороны которого есть шлицы для фиксации руля, а с другой – внутренние шлицы, которые крепятся к рулевой колонке.
- Рулевой колонки – литого корпуса, состоящего из червячной ведущей шестерни и ведомой, которая соединена с рулевой сошкой.
- Рулевых тяг, наконечников и маятников, в совокупности соединенных между собой шаровыми и резьбовыми соединениями.
Данной системой были оснащены старые модели «Жигулей» и «BMW».
Есть еще и винтовая система рулевого управления, схожая с червячным механизмом.
Более подробно с устройством и работой рулевого управления автомобиля вас познакомит это видео:
Особенности правостороннего и левостороннего руля
На сегодняшний день в части стран мира правостороннее движение, а в части – левостороннее. Рулевое колесо при этом располагается либо слева, либо справа. Это означает, что элементы конструкции, передающие с него усилия на колеса также расположены либо слева, либо справа.
Однако это не означает, что руль невозможно перенести на другое место. Такую процедуру выполняют во многих автосервисах. Впрочем, нужно понимать, что она достаточно сложна, так как требует:
- поиска или изготовления на заказ соответствующих деталей;
- приобретения новой приборной панели;
- перенесения всех приборов на другую сторону.
Все это делает смену положения руля дорогим удовольствием, поэтому многие водители, которые приобрели авто в стране с другим типом движения, оставляют его на прежнем месте.
Гораздо проще в этом плане дело обстоит с колесной дизельной техникой. Многие трактора, грейдеры, уборочные машины имеют гидрообъемное рулевое управление. При использовании подобной конструкции положение руля не имеет значения, поэтому его можно установить как справа, так и слева. Некоторые модели самоходных машин даже имеют гнезда для установки рулевого колеса с обеих сторон приборной панели.
Однако на легковых автомобилях гидрообъемное управление не устанавливают. Его изредка можно встретить на вездеходах и внедорожниках.
Какое оно бывает
Вы уже, наверное, заметили, что в современном рулевом управлении в комплекте идет электро усилитель руля.
В других комплектациях может идти гидроусилитель руля, а может и вообще, никакого усилителя нет, что характерно для бюджетных автомобилей.
Так же стоит заметить, что диаметр рулевого колеса может быть разным. Для легковых автомобилей такие показатели рулевого колеса могут быть в пределах от 380 мм до 425 мм. Для грузовых автомобилей в пределах от 440 мм до 550 мм.
В некоторых автомобилей вообще предусмотрена замена рулевого колеса на «вкус» водителя.
Такая замена происходит за доли секунды и обычно это характерно для спортивных автомобилей, где руль стандартного диаметра необходимо заменить на руль меньшего диаметра.
Недостатки переднего привода
Несмотря на все достоинства и лавры, доставшиеся переднему приводу, все-таки тип привода FWD считается не совершенным и имеет недостатки.
Существенным минусом считается обеспечение безопасности людей в авто. Ведь, несмотря на то, что переднепридные варианты машин не так сильно подвержены заносам как другие, у них все таи вероятность заноса остается. И в таком случае выровнять машину будет очень не легко, тут нужен опыт и сноровка, новичок может не справиться.
Чтобы совладать с передним приводом при заносе, специалисты советуют прибавлять тут же газу. К сожалению все обычно происходит настолько быстро, что водители не успевают порой на уровне инстинктов отреагировать на ситуацию. Тормозить нельзя ни в коем случае, чтобы не потерять управление вовсе. А если учесть что при таком приводе колеса поворотные, то будет необходимое ограничение на угол поворота.
Важно знать, что набирая скорость, часть общего веса машины переносится на заднюю часть и сцепление с дорожным полотном ухудшается в разы. Пробуксовки из-за этого неизбежны если вы владеет авто где стоит FWD привод
Гонки на таком авто противопоказаны и смертельно опасны, никакого дрифта на них не получится! У спортивных авто все по-другому. Плюсом заднего привода RWD можно считать наличие задней ведущей оси, позволяющей дрифтовать. Либо на гоночных авто еще используют полный привод.
Тормозная система
Позволяет замедлять движение машины, вплоть до её полной остановки. Незаменима система во время экстренных ситуаций, а также когда автомобиль надо удерживать от самопроизвольного движения вниз. Автомобильные тормоза включают несколько подсистем: ручную, запасную, вспомогательную, антиблокировочную. Их совокупность называется тормозным управлением.
Задача основной тормозной системы — регулировать скорость движения машины, останавливать транспортное средство в случае необходимости. Состоит она из привода и исполнительных механизмов (барабан, диск). На современных легковых авто чаще используется гидропривод, реже — электрический, пневмо или комбинированный варианты. В некоторых случаях для повышения давления жидкости и эффективности торможения применяются вакуумный усилитель и регулятор.







Ручной или стояночный тормоз, оснащённый механическим приводом, предназначен для:
- удержания машины на спусках;
- аварийного торможения в чрезвычайных случаях.
Коэффициенты эффективности замедления автомобиля, движущегося со скоростью 80 км/ч при усилии на педаль до 50 кг основной системы и подсистем:
- главный тормоз — не меньше 5,8 м/с2;
- аварийный и ручной — 2,75 м/с2.

Принцип функционирования тормозов прост. После нажатия на педаль тормозное усилие передаётся на колёсные механизмы. Последние прижимают к дискам колодки, тем самым останавливая вращение.
Активный усилитель руля. Устройство
Вы, наверное, думаете, что система активного рулевого управления очень сложна? На самом деле это не так, и принцип её работы довольно прост. Ключевыми элементами AFS являются:
- планетарный редуктор;
- блок управления;
- комплект датчиков.
Конструктивно данная технология неразрывно связана с механизмом рулевого управления. В целом всё выглядит так: в разрез рулевого вала вмонтирован блок с планетарным редуктором, внутри которого находятся так называемые солнечная и эпициклическая шестерни, блок сателлитов и электродвигатель.
Все эти элементы работают сообща лишь для одной цели – менять передаточное число между рулём и колёсами.

Руководит процессом электронный блок управления на основе данных, поступающих от целой армии датчиков, а именно: датчика угла поворота руля, суммарного угла поворота механизма, положения электродвигателя, а также спидометра и датчиков системы динамической стабилизации.
Переварив всю информацию, блок управления посылает команду на исполнительный механизм, коим является электромотор планетарного редуктора, который вращает эпициклическую шестерню.
Именно от направления и частоты её вращения зависит передаточное число, ощущаемое нами как изменение остроты руля в зависимости от скорости автомобиля. Вот такая история.
Похожие системы, меняющие чувствительность баранки есть и других автопроизводителей, например у Toyota — VGRS (Variable Gear Ratio Steering) , но работает она у японцев по иному принципу и это уже другая история.
На этом, друзья, разрешите подвести черту под этим рассказом. Не забывайте подписываться и следить за обновлениями нашего блога. Будет интересно!
Рассмотрим принцип работы системы активного рулевого управления, плюсы и минусы, устройство и схему. В конце статьи видео-обзор активного рулевого управления для автомобилей BMW.

Активное рулевое управление – усовершенствованная технология обычного рулевого управления. Чаще всего в перечне систем автомобиля обозначается как AFS – Active Front Steering, хотя в работе принимают участи и задние колеса. Основное предназначение правильное распределение усилия между всеми деталями и колесами, так же основная деталь повысить эффективность управления автомобилем на разных скоростях и маневрах.
Устройство и принцип работы системы AFS
. Конструкция достаточно простая и отличается неплохим КПД передачи крутящего момента руля (устанавливают на авто с независимой подвеской). Основой служит рулевая рейки с шестерней, сама же шестерня устанавливается на вал и постоянно находится в сцеплении с рейкой.
Вращая руль, рейка за счет шестеренки перемещается в горизонтальном положении влево или вправо. Тяги, прикрепленные к рейке, так же перемещаются в соответствии с поворотом руля, тем самым передавая усилия на колеса и поворачивая их по сторонам. Основные плюсы в самом строении, меньше тяг и шарниров, компактность, невысокая цена обслуживания, простота конструкции и надежность. Есть и минусы, редуктор такого механизма весьма чувствительный к неровностям на дороге, за чет чего любой удар колеса передается на руль.
Второй вид механизма –
. Считается самым старым видом среди существующих вариантов. Чаще всего встречается на классических, отечественных автомобилях, а так же на машинах с повышенной проходимостью. Как правило, подвеска таких автомобилей зависимая. От предыдущего вида червячный механизм отличается наличием червячного ролика, вместо шестерни, картера, а так же рулевой сошки.
Последний из видов рулевого управления –
. В отличие от двух предыдущих видов, механизм соединяется с помощью гайки и шариков специального винта. Как показывает практика, износ такого механизма минимальный, а детали ломаются очень редко.
Чаще всего винтовой механизм применяют на грузовых автомобилях, автобусах и легковых автомобилях представительского класса с повышенным комфортом и безопасностью. По принципу работы винтовой подвид работает так же, как и червячный, передавая момент прокручивания руля через червячную передачу.
Соответственно с зашитой логикой и программой блоки управления создают управление исполнительными механизмами как сервопривод рулевого механизма, сервопривод колес и электромагнитное сцепление возле руля. Рассмотрим механизмы и их назначение по отдельности. Благодаря сервоприводу рулевого механизма колеса повернутся на определенный угол, как правило, на каждое колесо инженеры установили свой сервопривод.
Для симуляции реальности поворота руля с усилием используется сервопривод руля, создается ощущения скольжения колес по дороге. Одним из важных элементов безопасности является электромагнитное сцепление. Во время подачи электроэнергии сцепление будет в разомкнутом состоянии, а рулевое управление будет проходить по проводам.
Принцип работы не такой то и сложный, когда водитель начинает вращать руль, датчик поворота руля считывает угол изменения положения и передает информацию на блоки управления. Далее идут расчеты, насколько нужно повернуть передние колеса. Таким образом, сервопривод перемещает рулевую рейку и обеспечивает поворот колес в соответствии с рассчитанным углом.
В это же время, рассчитав угол поворота, блок управления посылает обратно на сервопривод руля сигнал и имитирует усилие поворота колес. Как видим принцип работы механизма не сложный, но все же требует большой точности механизмов и их согласованности. Кроме этого стоит следить за исправностью всего механизма.
Самая главная функций эпициклической шестерни — изменение передаточного отношение, которое может достигать 1:10 при максимальной скорости вращения в определенном направлении. При этом руль становится острым, а углы поворота влево и вправо до упора уменьшаются, благодаря чему достигается больший комфорт в управлении.
При росте скорости движения, электродвигатель вращается медленней и передаточное отношение рулевого механизма уменьшается. В конечном итоге, электродвигатель прекращает свое вращение, это происходит на скорости в 180-200 км/ч, а усилие от рулевого колеса передает напрямую на рулевой механизм.
Если вдруг при повороте, будет зафиксирована избыточная поворачеваемость (потеря сцепления задних колес с поверхностью), то система динамической стабилизации DSC автоматически корректирует углы повороты передних колес. Также система стабилизирует движения автомобиля на скользкой дороге или при торможении.
Дальнейшее включение электромотора осуществляется с набором скорости, при этом его ротор вращается в обратную сторону. Величина передаточного числа равняется 1:20, многократно снижается острота руля и возрастает величина его оборотов, что позволяет в разы увеличить управляемость транспортным средством во время езды при высоком скоростном режиме.






Напоследок отметим, что система AFS постоянно находится в рабочем состоянии. Отключить ее невозможно.
Требования к системе рулевого управления
Система рулевого управления преобразует создаваемые водителем вращательные движения рулевого колеса в изменение угла поворота управляемых колес автомобиля. Конструкция и схема системы призваны обеспечить удобное и безопасное рулевое управление автомобиля во всех ситуациях и на всех скоростях. Вся система рулевого управления, от рулевого колеса и до управляемых колес, должна в этих целях обладать следующими свойствами.
Передача инициируемых водителем рулящих движений на рулевом колесе без люфта особенно важна при движении по прямой. Это гарантирует безопасное, неутомительное для водителя управление автомобилем, прежде всего на средних и высоких скоростях.
Поэтому рулевой механизм должен быть очень жестким. Это необходимо для обеспечения точной управляемости и преодоления отклонения от заданного угла поворота рулевого колеса под действием изменяющихся возвратных сил, возникающих, например, при изменении бокового ускорения.
Слабое трение в рулевом механизме позволяет водителю получать через реактивные силы тактильную обратную связь, дающую информацию о коэффициенте сцепления между дорогой и шинами. Слабое трение также помогает колесам выровняться для движения по прямой. В системах рулевого управления с мускульной энергией слабое трение обеспечивает небольшие движущие силы. В системах рулевого управления с усилителем оно повышает эффективность управления.
Кинематические параметры рулевого управления и конструкция управляемой оси автомобиля должны быть такими, чтобы водитель мог чувствовать величину сцепления между шинами и дорогой.
Требования к рулевому управлению
Требованиями к функционированию системы рулевого управления являются:
Легкое, безопасное рулевое управление автомобилем. Сюда, к примеру, относится тенденция рулевого управления автоматически возвращаться в положение прямолинейного движения при отпускании руля.
Максимально возможное демпфирование колебаний, передаваемых от колес автомобиля на рулевое колесо при движении по неровным дорогам. Но этот процесс не должен приводить к потере обратной связи в рулевом управлении.
Для обеспечения чистого качения колес и, соответственно, предотвращения их избыточного износа вся рулевая кинематика должна удовлетворять условию Аккермана. Это означает, что оси управляемых колес должны пересекаться в одной точке с осью задних колес (рис. «Условие Аккермана» ).
Достаточно жесткая схема всех компонентов рулевого механизма означает, что даже малые инициируемые водителем рулевые движения преобразуются в изменение направления управляемых колес, обеспечивая безопасную и точную управляемость автомобиля.
Угол поворота рулевого колеса от упора до упора по соображениям комфорта должен быть как можно меньше при парковке и движении с небольшой скоростью. Однако на средних и высоких скоростях рулевое управление не должно быть столь чувствительным.
Требования законодательства, предъявляемые к системам рулевого управления автомобилей
Требования законодательства, предъявляемые к системам рулевого управления автомобилей, описаны в международных правилах ECE-R79. К этим требованиям, наряду с базовыми функциональными требованиями, относятся максимально допустимые управляющие силы для исправной и неисправной систем рулевого управления. Эти требования регламентируют прежде всего поведение автомобиля и рулевого управления при въезде на круг и выезде с круга. Для автомобилей всех категорий: после отпускания рулевого колеса при движении автомобиля по окружности на скорости 10 км/ч, радиус поворота автомобиля должен увеличиться или как минимум остаться тем же.
Для автомобилей категории М1 (легковые автомобили с числом посадочных мест до 8): когда автомобиль в тангенциальном направлении выезжает из круга с радиусом 50 м на скорости 50 км/ч, в системе рулевого управления не должно возникать никаких необычных вибраций. В автомобилях категорий М2, М3, N1, N2 и N3 это поведение должно демонстрироваться на скорости 40 км/ч или, если это значение не достигается, то на максимальной скорости.
Это поведение также предписывается в случае неисправности у автомобилей с гидро- или электроусилителем рулевого управления. У автомобилей категории М1 это должно быть возможно в случае отказа сервопривода рулевого управления для въезда со скоростью 10 км/ч в течение 4 секунд в круг радиусом 20 м. Управляющее усилие на рулевом колесе не должно превышать 30 даН (табл. «Нормы рабочих усилий в системе рулевого управления» ).
Достоинства переднего привода

1. У переднеприводных автомобилей движок ставится поперек авто, за счет которого вращение коленвала сразу передается колесам. Получается, что количество переходников крутящего момента резко падает, что нельзя не назвать преимуществом для работы техники. 2. Передней приводной осью при такой комплектации можно даже гордиться. Ведь она берет всю нагрузку машины на себя, хотя масса мотора тут немалая. При этом получается, что сама ось, ведущая, и сцепление с дорогой обеспечивается наилучшим образом.
Вне зависимости от погоды водить переднеприводную машину будет намного легче. Она управляемая и послушная даже в снег и гололед. Но нагнетать скорость в такую погоду владельцам не стоит, это чревато тем, что машину начнет заносить на скорости.
3. Как уже говорилось выше переднему приводу мы обязаны за свободное место под капотом и даже в салоне, а также тому, что стоимость такого авто более доступна, нежели с задним приводом.



