Что входит в рулевое управление?
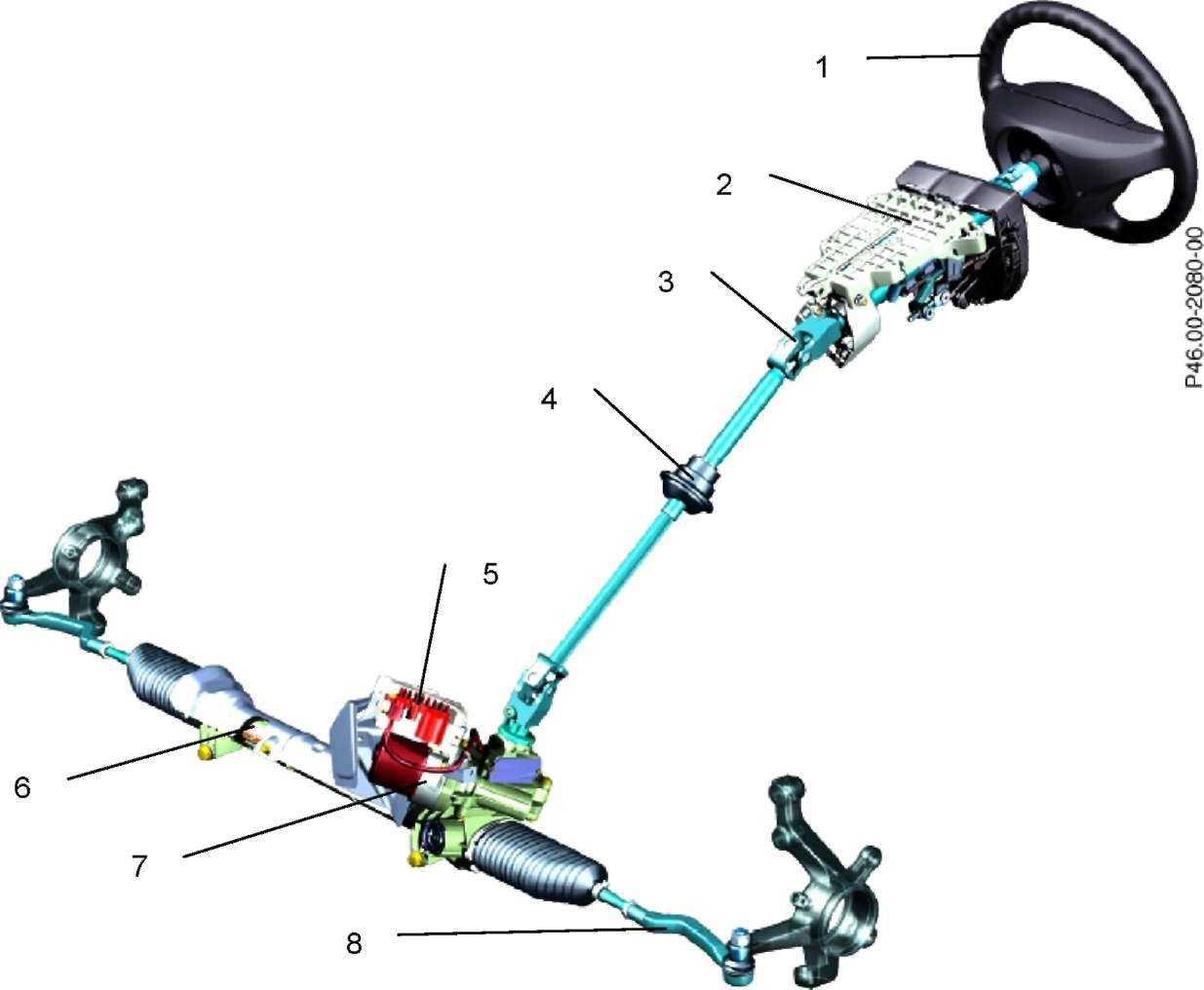
Между рулем и механизмом расположена рулевая колонка, которая представлена прочным валом с шарнирными соединениями. Особенностью конструкции колонки является минимальный риск получения травматизма водителя в случае ДТП, поскольку при сильном лобовом столкновении происходит ее схлопывание. Для комфортной эксплуатации транспортного средства, положение рулевой колонки настраивается при помощи механического либо электрического привода. Помимо этого, предусмотрена система блокировки механизма, которая позволяет предотвратить угон автомобиля.
Главное назначение рулевого управления заключается в увеличении механического усилия водителя и его передача на колеса. Для этого в конструкцию системы включен специальный редуктор. На легковых автомобилях в основном используют следующие типы рулевого управления:
- Реечный механизм, конструкция которого состоит из набора смонтированных на валу шестерней, агрегатируемых с рейкой, на одной из ее плоскостей по всей длине нанесены специальные зубцы. При вращении руля усилие через колонку передается рулевой рейке, в результате чего она свободно перемещается, взаимодействуя с рулевыми тягами и поворачивая колеса. Необходимо заметить, что рулевое управление автомобилем может иметь рейку, на которой располагаются зубья с переменным шагом. Такая конструкция значительно повышает эффективность управления транспортным средством.
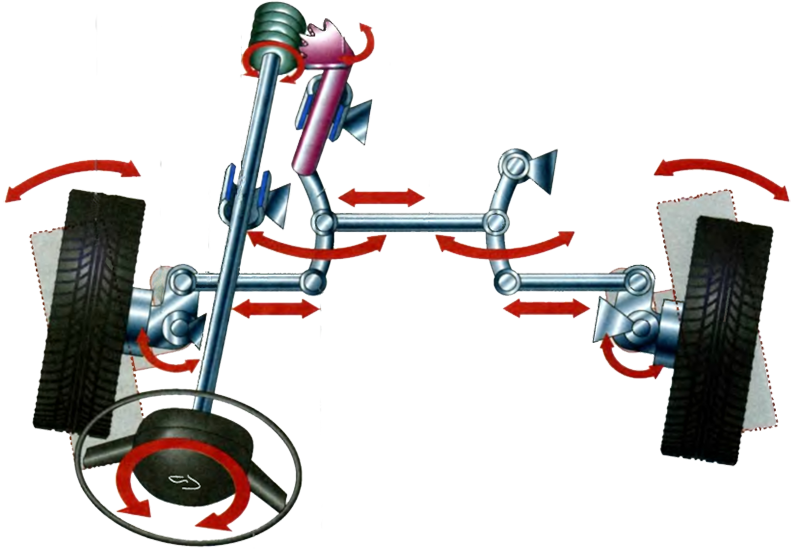
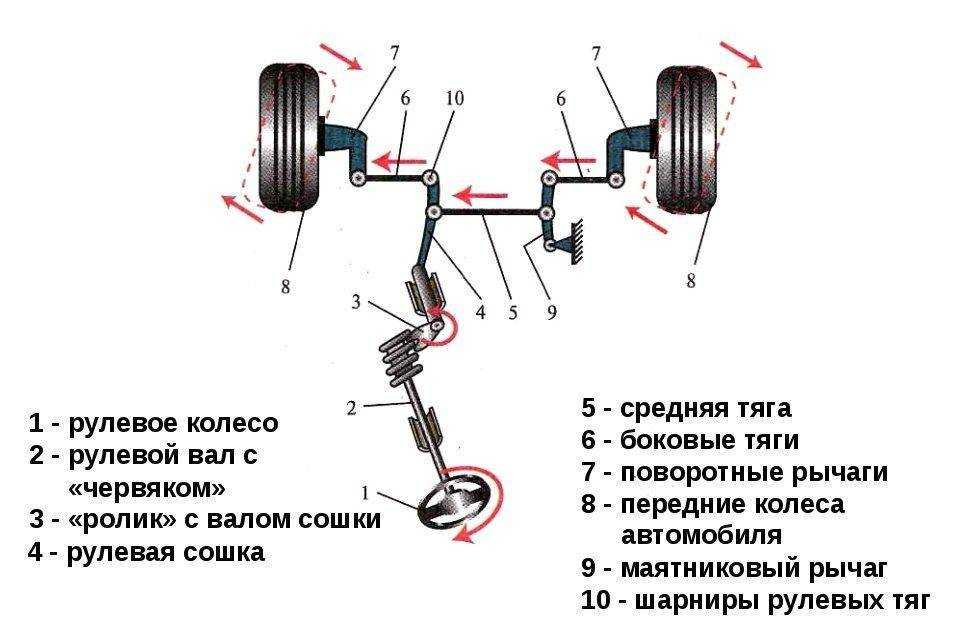
- Червячный рулевой механизм. Его принцип функционирования следующий: «червяк» при взаимодействии с ведомой шестерней передает усилие сошке. В свою очередь, сошка рулевого управления взаимодействует с одной из тяг, конец которой заканчивается маятниковым рычагом. Этот рычаг смонтирован на опоре. При повороте руля сошка приводит в движение боковую тягу одновременно со средним рычагом, который взаимодействует со второй боковой тягой и изменяет ее положение. Благодаря этому осуществляется поворот ступиц управляемых колес.
Принцип работы рулевого управления
Для примера возьмем ситуацию, при которой водителю необходимо повернуть налево.
Вращение руля влево валом колонки передается на шестерню, и она тоже вращается в ту же сторону. За счет зубчатого зацепления шестеренка смещает рейку вправо.
Сдвигаясь, рейка тянет левую рулевую тягу, из-за чего амортизационная стойка или ступица проворачивается вокруг оси влево, обеспечивая поворот левого колеса в нужную сторону.
Одновременно рейка толкает правую рулевую тягу, что приводит к повороту правого колеса влево. В результате колеса управляемой оси поворачиваются синхронно, но угол поворота у них разный, что исключает скольжение колес при маневре.
Разница углов поворота обеспечивается заданием установочных углов (развала и схождения) управляемым колесам.
Усилители
Рулевое управление автомобилей сейчас комплектуется усилителями, обеспечивающими повышение усилия, прикладываемого водителем к рулю.
Наибольшее распространение получили усилители гидравлического и электрического типов.
В первом варианте дополнительное усилие создается за счет давления жидкости, нагнетание которой выполняется специальным насосом. Особенностью конструкции гидроусилителя является использование рулевого механизма в качестве гидравлического силового цилиндра (корпус выполняет роль цилиндра, а рейка – поршня).
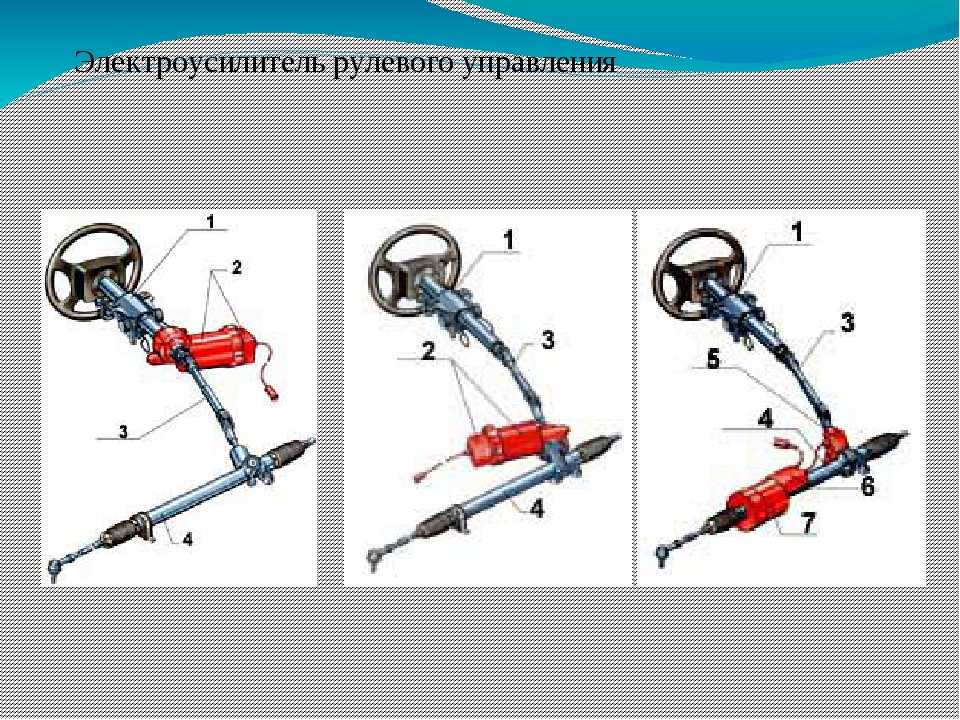
В электрическом усилителе дополнительно усилие создается электродвигателем с редуктором. На автомобилях используется два типа электроусилителей – располагаемых на колонке и воздействующих на ее вал, а также входящие в конструкцию механизма (взаимодействует с рейкой).
Требования к системе рулевого управления
Система рулевого управления преобразует создаваемые водителем вращательные движения рулевого колеса в изменение угла поворота управляемых колес автомобиля. Конструкция и схема системы призваны обеспечить удобное и безопасное рулевое управление автомобиля во всех ситуациях и на всех скоростях. Вся система рулевого управления, от рулевого колеса и до управляемых колес, должна в этих целях обладать следующими свойствами.
Передача инициируемых водителем рулящих движений на рулевом колесе без люфта особенно важна при движении по прямой. Это гарантирует безопасное, неутомительное для водителя управление автомобилем, прежде всего на средних и высоких скоростях.
Поэтому рулевой механизм должен быть очень жестким. Это необходимо для обеспечения точной управляемости и преодоления отклонения от заданного угла поворота рулевого колеса под действием изменяющихся возвратных сил, возникающих, например, при изменении бокового ускорения.
Слабое трение в рулевом механизме позволяет водителю получать через реактивные силы тактильную обратную связь, дающую информацию о коэффициенте сцепления между дорогой и шинами. Слабое трение также помогает колесам выровняться для движения по прямой. В системах рулевого управления с мускульной энергией слабое трение обеспечивает небольшие движущие силы. В системах рулевого управления с усилителем оно повышает эффективность управления.
Кинематические параметры рулевого управления и конструкция управляемой оси автомобиля должны быть такими, чтобы водитель мог чувствовать величину сцепления между шинами и дорогой.
Требования к рулевому управлению
Требованиями к функционированию системы рулевого управления являются:
Легкое, безопасное рулевое управление автомобилем. Сюда, к примеру, относится тенденция рулевого управления автоматически возвращаться в положение прямолинейного движения при отпускании руля.
Максимально возможное демпфирование колебаний, передаваемых от колес автомобиля на рулевое колесо при движении по неровным дорогам. Но этот процесс не должен приводить к потере обратной связи в рулевом управлении.
Для обеспечения чистого качения колес и, соответственно, предотвращения их избыточного износа вся рулевая кинематика должна удовлетворять условию Аккермана. Это означает, что оси управляемых колес должны пересекаться в одной точке с осью задних колес (рис. «Условие Аккермана» ).
Достаточно жесткая схема всех компонентов рулевого механизма означает, что даже малые инициируемые водителем рулевые движения преобразуются в изменение направления управляемых колес, обеспечивая безопасную и точную управляемость автомобиля.
Угол поворота рулевого колеса от упора до упора по соображениям комфорта должен быть как можно меньше при парковке и движении с небольшой скоростью. Однако на средних и высоких скоростях рулевое управление не должно быть столь чувствительным.
Требования законодательства, предъявляемые к системам рулевого управления автомобилей
Требования законодательства, предъявляемые к системам рулевого управления автомобилей, описаны в международных правилах ECE-R79. К этим требованиям, наряду с базовыми функциональными требованиями, относятся максимально допустимые управляющие силы для исправной и неисправной систем рулевого управления. Эти требования регламентируют прежде всего поведение автомобиля и рулевого управления при въезде на круг и выезде с круга. Для автомобилей всех категорий: после отпускания рулевого колеса при движении автомобиля по окружности на скорости 10 км/ч, радиус поворота автомобиля должен увеличиться или как минимум остаться тем же.
Для автомобилей категории М1 (легковые автомобили с числом посадочных мест до 8): когда автомобиль в тангенциальном направлении выезжает из круга с радиусом 50 м на скорости 50 км/ч, в системе рулевого управления не должно возникать никаких необычных вибраций. В автомобилях категорий М2, М3, N1, N2 и N3 это поведение должно демонстрироваться на скорости 40 км/ч или, если это значение не достигается, то на максимальной скорости.
Это поведение также предписывается в случае неисправности у автомобилей с гидро- или электроусилителем рулевого управления. У автомобилей категории М1 это должно быть возможно в случае отказа сервопривода рулевого управления для въезда со скоростью 10 км/ч в течение 4 секунд в круг радиусом 20 м. Управляющее усилие на рулевом колесе не должно превышать 30 даН (табл. «Нормы рабочих усилий в системе рулевого управления» ).
Рулевые механизмы
Рулевые механизмы по конструкции делят: на винтовые, червячные и шестеренчатые. Требования, предъявляемые к конструкции рулевых механизмов, достаточно противоречивы. Для легкого поворота управляемых колес необходимо иметь большое передаточное отношение рулевого механизма, но при этом увеличивается время поворота управляемых колес. Поэтому, при постоянном значении передаточного числа Uрм редуктора рулевого механизма его величину для легковых автомобилей ограничивают в пределах Uрм = 12 … 20, для грузовых автомобилей Uрм = 15 … 25.
Рулевой механизм с глобоидным червяком и роликом (рис. 7) отличается малым внутренним трением и вследствие этого высокой долговечностью незначительным износом контактирующих поверхностей. Условия зацепления червяка и ролика практически не изменяются при больших углах поворота червяка.
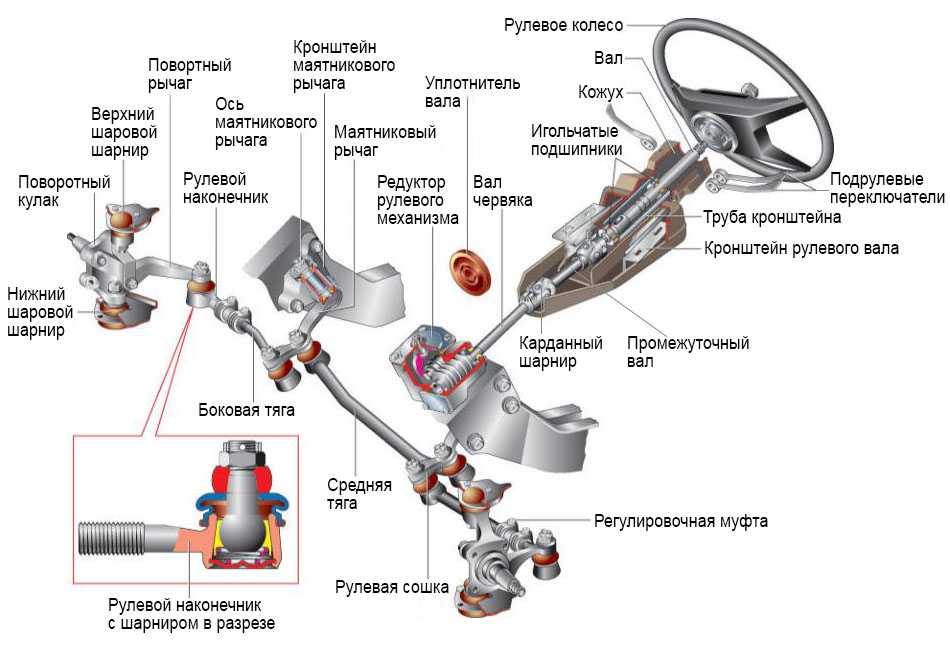
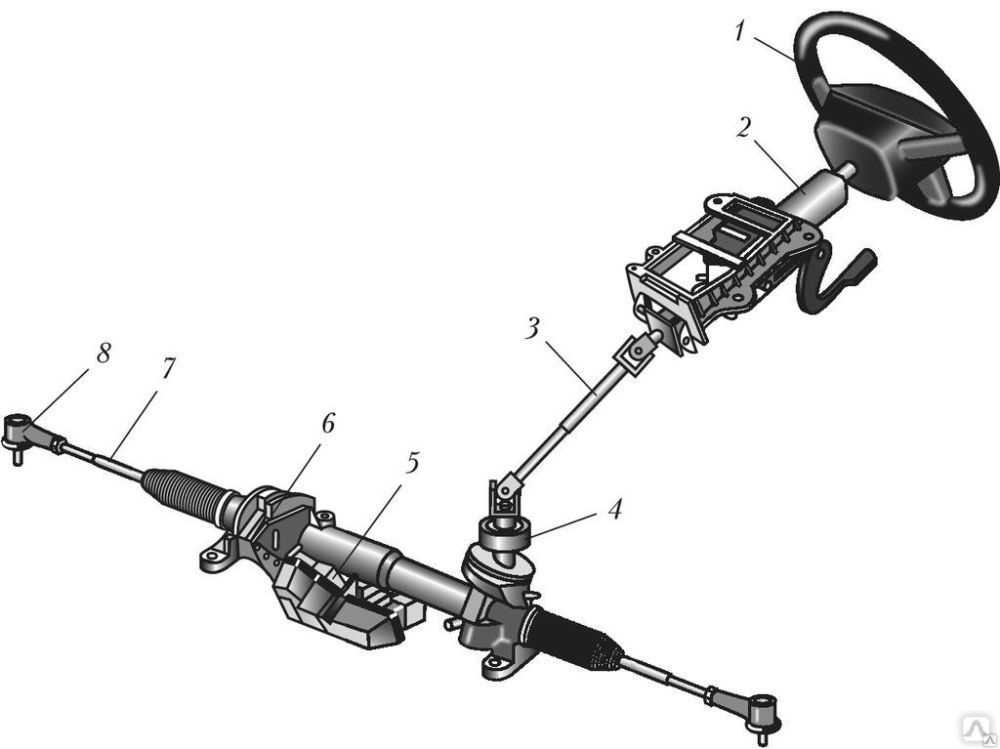



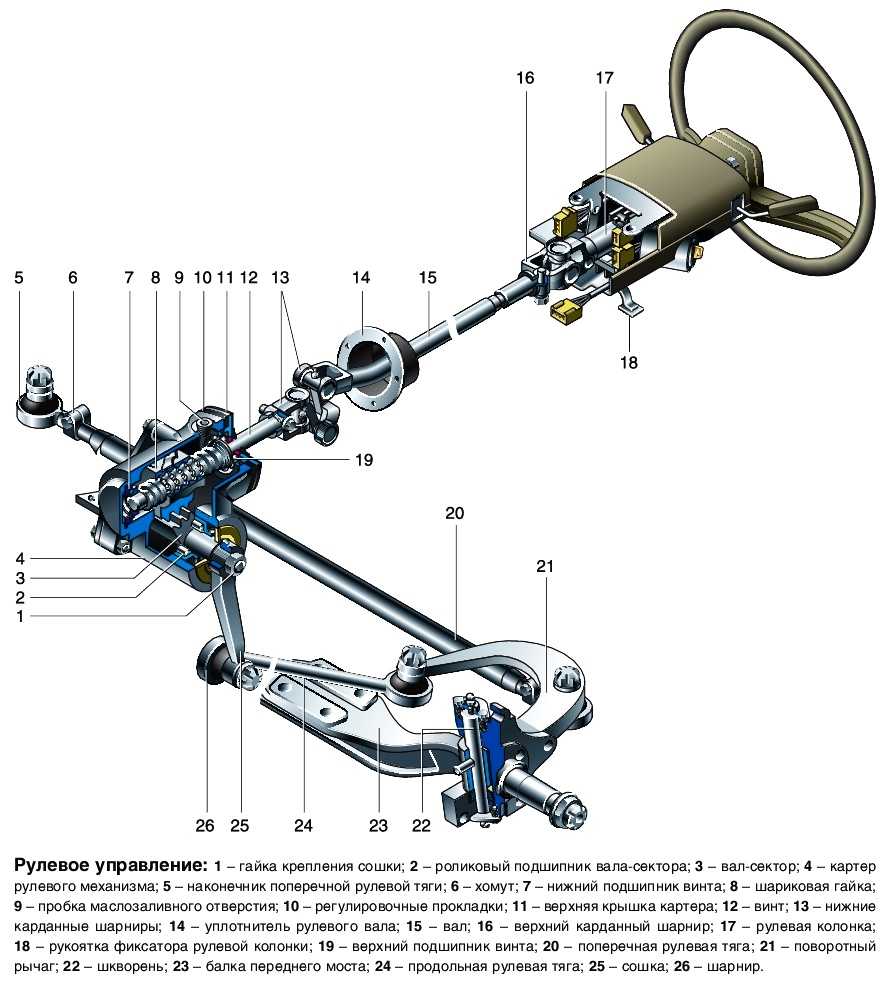

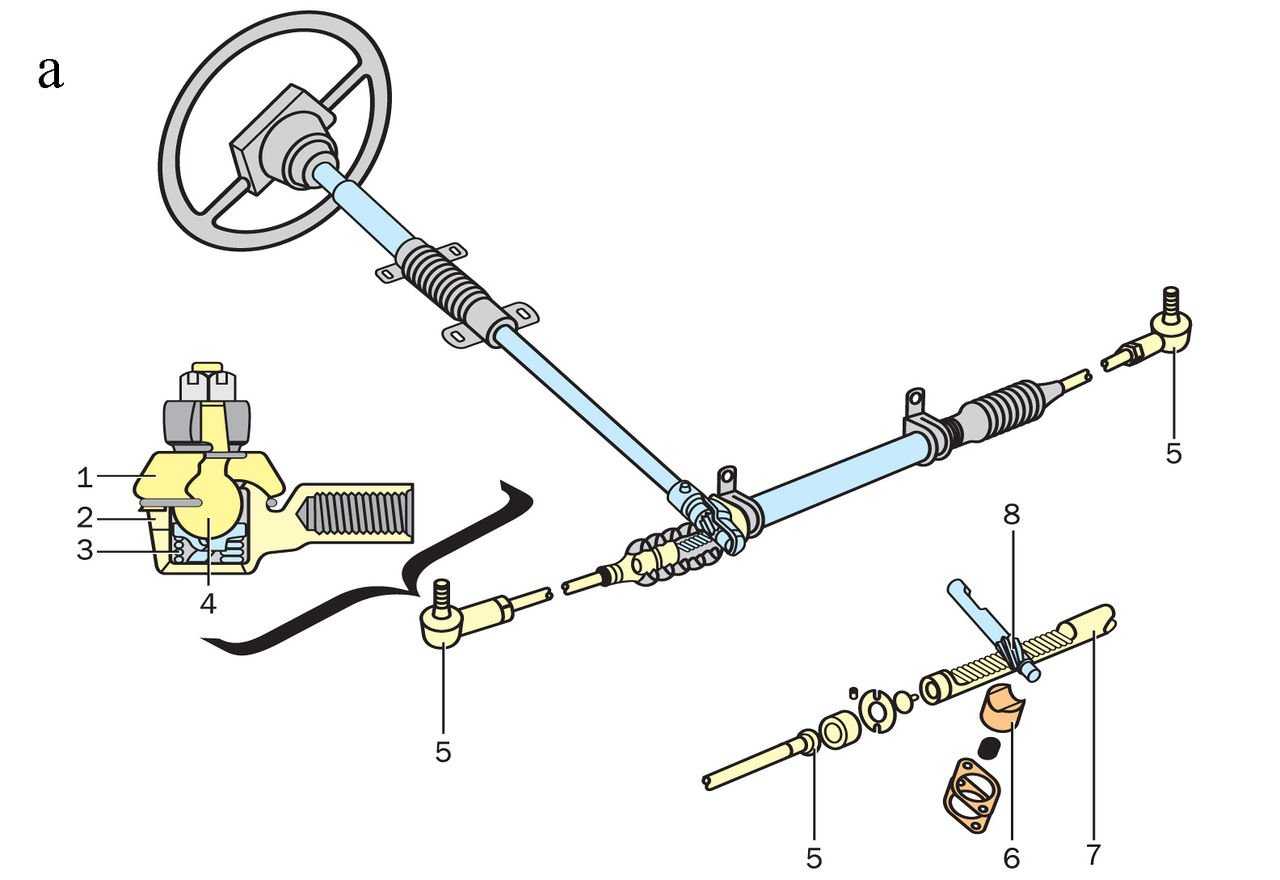
Рис. 7. Рулевой механизм с глобоидным червяком и роликом
Глобоидальный червяк (глобоида — образующая червяка) позволяет выполнять регулировку зацепления даже при относительно больших износах. В картере 1 рулевого механизма на роликовом подшипнике 2 и подшипнике скольжения 3 установлен вал 4 сошки 5. В проушине вала 4 неподвижно закреплена ось 6 трехгребневого ролика 8. Ролик вращается на игольчатых подшипниках 7. Гребни ролика входят в зацепление с винтом глобоидного червяка 9, неподвижно закрепленного на рулевом валу 10, вращающемся на роликовых подшипниках 11. При повороте рулевого колеса поворачивается червяк 9 и вал 4 сошки вместе с роликом 8.
Ось 6 ролика сдвинута по отношению к оси червяка на величину Δ, равную примерно (5… 7) мм, что позволяет устранить зазор в зацеплении в случае износа деталей. Зазор устраняется смещением вала сошки вправо с помощью регулировочного винта 12, фиксируемого контргайкой 13. Регулировка зазора производится при положении прямолинейного движения управляемых колес. Зазоры в конических подшипниках 11 устраняются уменьшением количества прокладок 14.
Рулевой механизм винт — гайка — рейка — сектор (рис. ![]() является комбинированным рулевым механизмом с двухступенчатым редуктором, отличающимся повышенным ресурсом. Первоначально применялся для грузовых автомобилей с большой полной массой.
является комбинированным рулевым механизмом с двухступенчатым редуктором, отличающимся повышенным ресурсом. Первоначально применялся для грузовых автомобилей с большой полной массой.
Рис. 8. Рулевой механизм винт — гайка — рейка — сектор
В первой ступени комбинированного рулевого механизма, вращение винта 1, жестко соединенного с валом рулевого колеса, преобразуется в поступательное движение шариковой гайки 2, на наружной поверхности которой нарезаны зубья рейки 3. Вторая ступень редуктора состоит из зубчатой рейки 3, находящейся в зацеплении с зубчатым сектором 4, закрепленном на валу сошки 5. Для увеличения КПД механизма, трение скольжения в гайке заменяют трением качения с помощью шариков 6.
Винт 1 установлен в картере 9 рулевого механизма на двух конических подшипников 10, натяг которых регулируется количеством прокладок между картером 9 и крышкой 11. Регулировка зазора в зацеплении рейка — сектор выполняется смещением вала 5 сошки вдоль оси вращения с помощью регулировочного вина 7, фиксируемого контргайкой 8. регулировка обеспечивается за счет конической формы и переменной толщины зубьев рейки и сектора.
Шестеренчатый (реечный) рулевой механизм (рис. 9) отличается простотой конструкции и в основном применяется на легковых автомобилях категории Ml. Редуктор состоит из шестерни 3, закрепленной на ведущем валу 2 и зубчатой рейки 4. При повороте рулевого колеса шестерня 3 перемещает рейку 4, с которой соединяются боковые тяги 8 и 9 привода рулевого управления. Боковые тяги шарнирно соединены с поворотными рычагами 11, жестко закрепленными на поворотных цапфах управляемых колес. Картер рулевого механизма 5 крепится к кузову автомобиля 17. Рулевой вал 2 с неподвижно закрепленной на нем шестерней 3 вращается в упорных шариковых подшипниках 12, установленных в картере 5.
Рис. 9. Реечный рулевой механизм
Предварительный натяг (зазор) в подшипниках регулируется с помощью регулировочного кольца 6. Рейка поджимается к шестерне упором 14 с пружиной 15. Угол схождения колес регулируется длиной боковых тяг с помощью резьбовых соединений 10 тяг 8 и 9 с шарнирами 16.
Устройство рулевого управления
Рассмотрим устройство рулевого управления колесных машин с управляемыми колесами. Конструктивно рулевое управление состоит из:
- рулевого механизма;
- усилителя;
- рулевого привода.
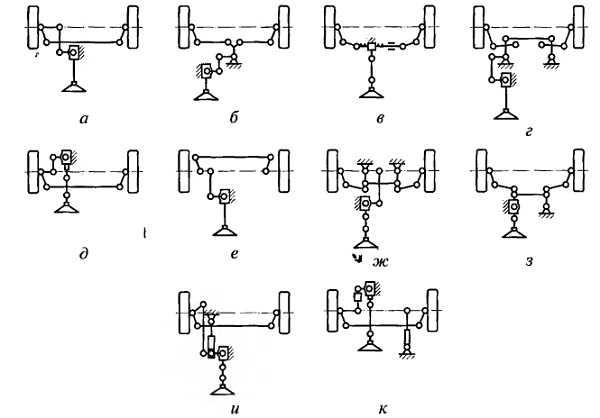
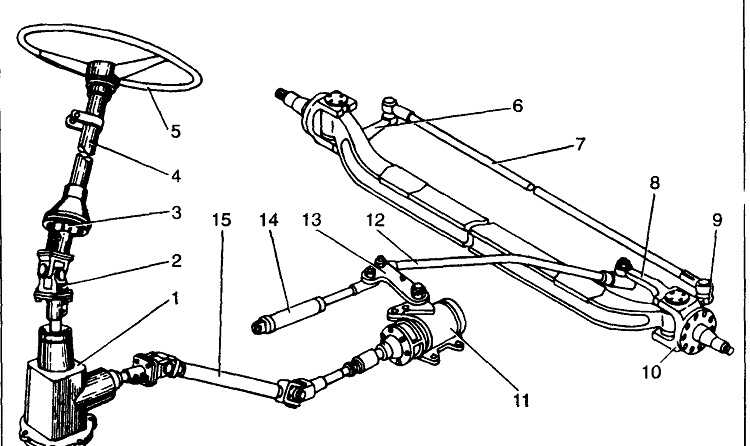
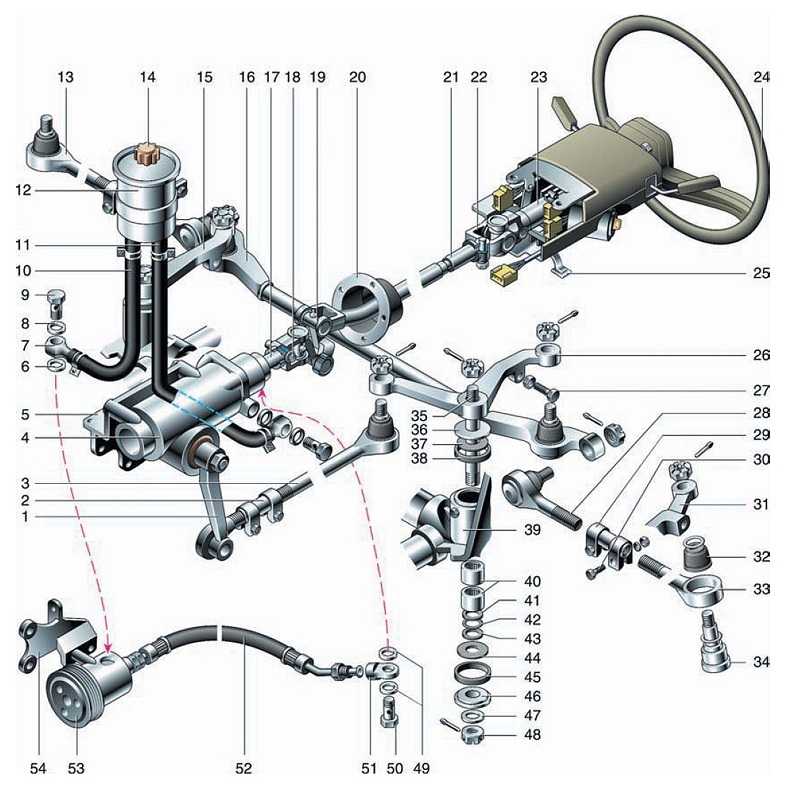
Компоновка рулевого управления грузового автомобиля с управляемыми колесами первой оси (КамАЗ, МАЗ) показана на рисунке. Использование регулируемых рулевых колонок позволяет менять угол наклона ступенчато, как правило, с шагом 5° в пределах до 40°. Рулевое управление с передними управляемыми колесами применяется у двух- и трехосных автомобилей. Компоновка и конструкция рулевого управления сравнительно просты и принципиально могут быть сведены к схемам, приведенным на рисунке.
На четырехосных автомобилях чаще всего устанавливают рулевое управление с поворотом колес первой и второй осей, первой и четвертой, либо всех осей.
 Чтобы автомобиль мог двигаться в заданном водителем направлении нужно рулевое управление. В систему рулевого управления входит рулевой механизм и рулевой привод. В этой статье мы подробно разберем устройство рулевого управления автомобиля и его работу.
Чтобы автомобиль мог двигаться в заданном водителем направлении нужно рулевое управление. В систему рулевого управления входит рулевой механизм и рулевой привод. В этой статье мы подробно разберем устройство рулевого управления автомобиля и его работу.
И так, рулевой механизм может быть червячным, реечным и активным. Рассмотрим их устройство и работу подробнее…
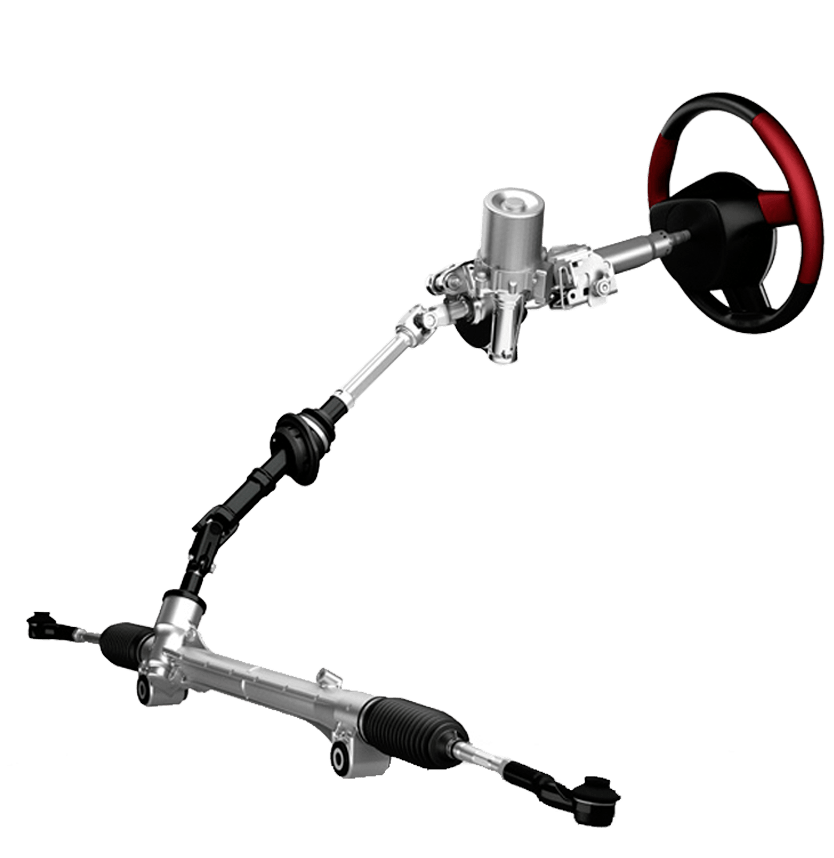
Устройство реечного рулевого механизма
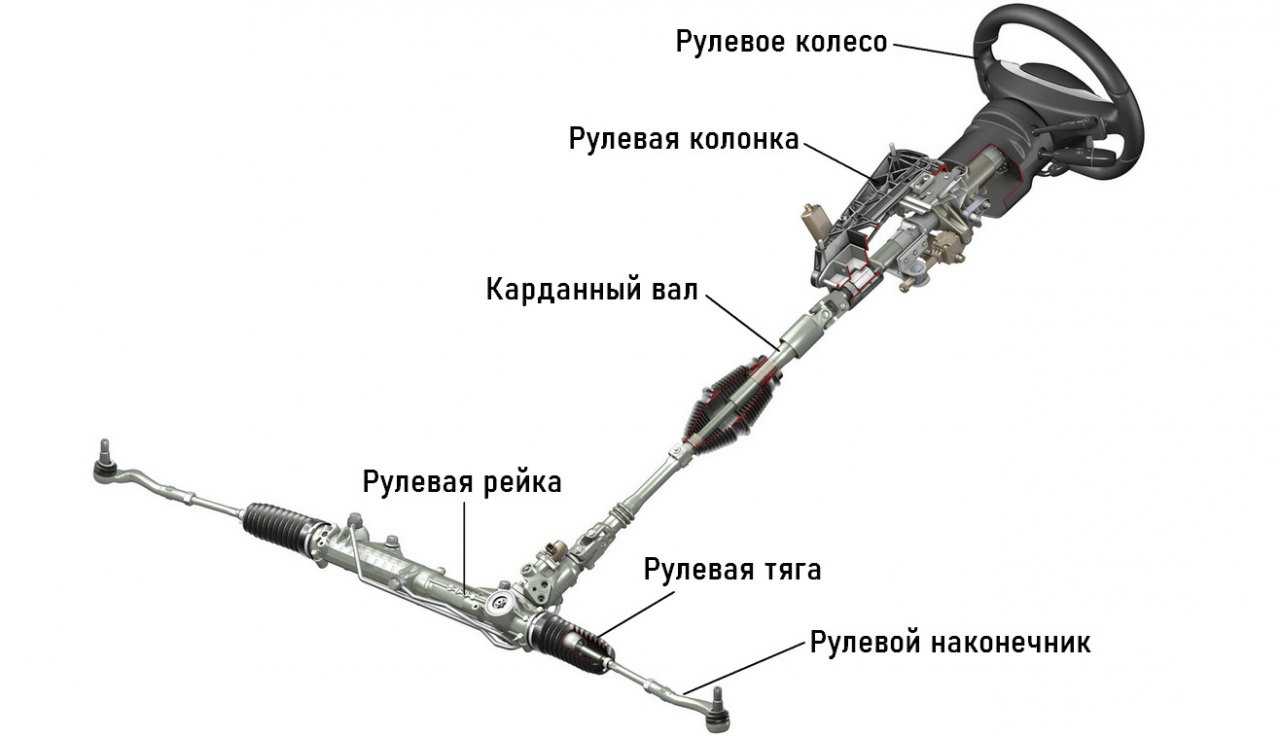
Реечный рулевой механизм – самый распространенный в наши дни, и состоит он из:
- Рулевого колеса (руля);
- Рулевого вала;
- Рулевой рейки, являющейся узлом, состоящим из зубчатой рейки и приводимой в движение рулевой шестерней. Концы зубчатой рейки имеют резьбовые отверстия для крепления рулевых тяг.
- Рулевых тяг, являющихся металлическими стержнями, имеющими на одном конце резьбу, а на другом – шарнирное шаровое устройство с резьбой.
- Рулевого наконечника – корпуса с шаровым шарниром и внутренней резьбой, куда вкручиваются рулевые тяги.
И так, рулевое колесо вращается, передавая усилие на шестерню, приводящую в действие рулевую рейку, которая выезжает из корпуса вправо или влево и передает усилие на рулевой рычаг с наконечником, вставленным в ступицу, поворачиваемую им.
Чтобы свести на минимум усилия водителя при работе с рулем, реечное рулевое устройство имеет усилители руля. Поговорим о них подробнее…
Усилители руля
К усилителям руля относятся вспомогательные устройства для обеспечения его вращения. К типам усилителей относятся электроусилитель, гидроусилитель, пневмоусилитель и гидроэлектроусилитель.
Гидроэлектроусилитель имеет ту же систему, однако вращение насоса осуществляется электромотором.
Электроусилитель также оснащен электромотором, который соединен непосредственно с рулевым валом или рейкой, а управление происходит электронным блоком. Второе название электроусилителя – адаптивный усилитель, поскольку можно в зависимости от скорости движения авто прикладывать разные усилия к вращению руля. Яркий представитель такой системы – Servotronic.
Пневмоусилитель близок по строению с гидроусилителем, однако вместо жидкости используется сжатый воздух.
Устройство активной рулевой системы
В наше время активная рулевая система является самой продвинутой. Состоит она из:
- Рулевой рейки с планетарным механизмом и электродвигателем;
- Блока электронного управления;
- Рулевых тяг, наконечников;
- Рулевого колеса.
Рулевое колесо начитает вращаться, а с ним и планетарный механизм, приводящий в действие рейку, однако в зависимости от скорости движения передаточное число будет разным.
Солнечная шестерня снаружи вращается электродвигателем, и передаточное число будет меняться в зависимости от скорости вращения. На большой скорости даже небольшое движение руля может привести к плачевным последствиям, поэтому электромотор включается, вращает солнечную шестерню, и при повороте нужно будет больше довернуть руль. Если скорость маленькая, то вращение электродвигателя происходит в другую сторону, и управление автомобилем становится более комфортным.






Устройство червячной рулевой системы
Червячная рулевая система состоит из:
- Руля;
- Рулевого вала с крестовиной – металлического стержня, с одной стороны которого есть шлицы для фиксации руля, а с другой – внутренние шлицы, которые крепятся к рулевой колонке.
- Рулевой колонки – литого корпуса, состоящего из червячной ведущей шестерни и ведомой, которая соединена с рулевой сошкой.
- Рулевых тяг, наконечников и маятников, в совокупности соединенных между собой шаровыми и резьбовыми соединениями.
Данной системой были оснащены старые модели «Жигулей» и «BMW».
Есть еще и винтовая система рулевого управления, схожая с червячным механизмом.
Более подробно с устройством и работой рулевого управления автомобиля вас познакомит это видео:
Управление по проводам
Будущее не за хитрой механикой или гидравликой. Инженеры работают над системами без механической связи между рулем и колесами — управление по проводам . Вращение руля отслеживает специальный датчик. Электронный блок, получая информацию о скорости, боковых и вертикальных ускорениях, посылает сигнал на актуаторы — электромоторы, поворачивающие колеса.
 Преимущества очевидны. В критической ситуации автомобиль сможет самостоятельно (быстрее человека) повернуть колеса на нужный угол. Допустим, системе стабилизации не удалось предотвратить занос, и машина закрутилась на обледеневшем шоссе. Быстродействующая электроника, опросив датчики, повернет руль на сколько нужно, и притормозит одно или пару колес.
Преимущества очевидны. В критической ситуации автомобиль сможет самостоятельно (быстрее человека) повернуть колеса на нужный угол. Допустим, системе стабилизации не удалось предотвратить занос, и машина закрутилась на обледеневшем шоссе. Быстродействующая электроника, опросив датчики, повернет руль на сколько нужно, и притормозит одно или пару колес.
Первой в мире серийной моделью с рулевым управлением «по проводам» стал Infiniti Q50. У данной машины в штатных режимах движения нет жесткой связи между баранкой и управляемыми колесами. А на случай неисправности электроники предусмотрена аварийная кулачковая муфта, встроенная в разрез рулевого вала.
Самостоятельность автомобиля намного упростит жизнь водителю: например, компьютер ловко припаркуется. А когда машины научат хорошо «видеть», они смогут объезжать препятствия.
Рулевое управление предназначено для изменения направления движения автомобиля. Обычно управляемыми являются колеса передней оси, но это преимущественно на легковых автомобилях. Иногда для улучшения управляемости автомобиля и сохранения над ним полного контроля его делают полноуправляемым, то есть управляемыми являются не только основные передние колеса – задние также имеют возможность отклоняться на определенный угол.
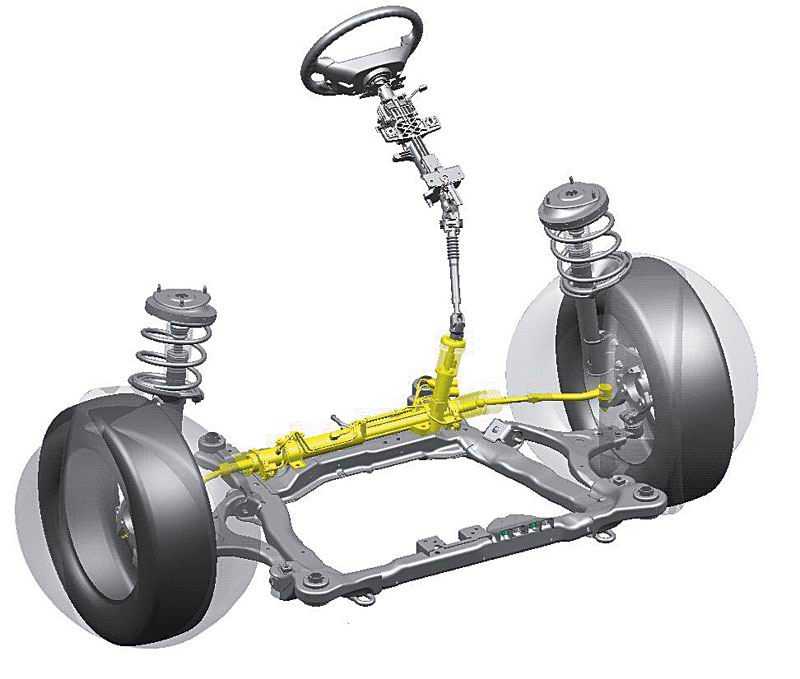
Рулевое управление может быть с усилителем или без него, может устанавливаться на поперечине кузова в моторном отсеке или на подрамнике (практически на всех современных автомобилях).
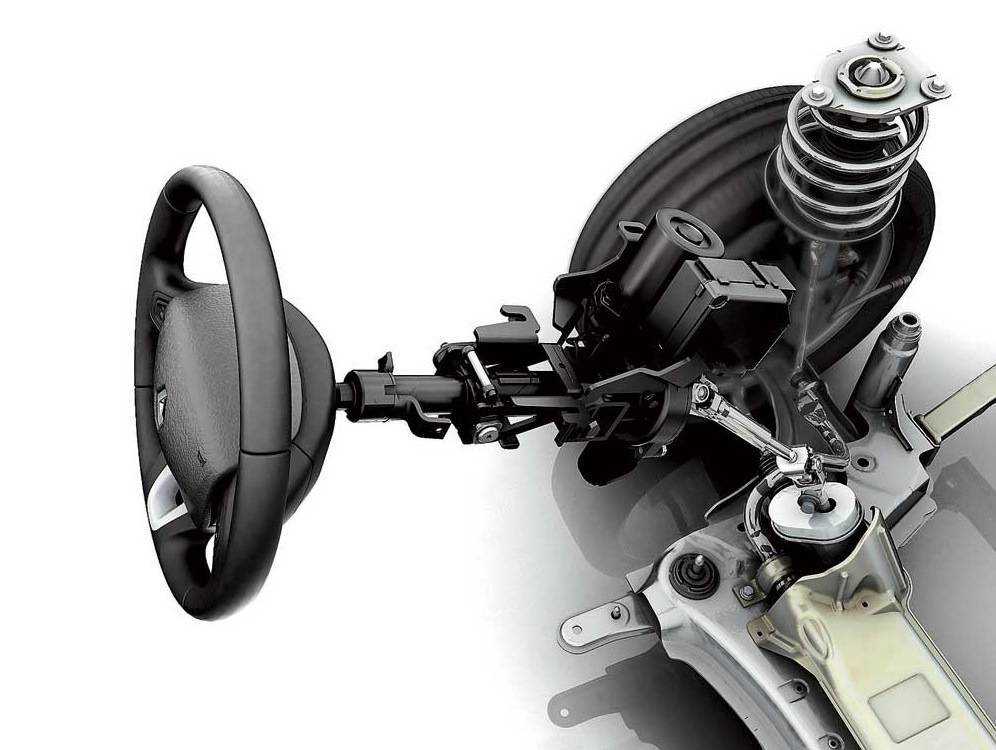
Рулевое колесо и рулевая колонка
Рулевая колонка, это, по сути, два вала (реже один), соединенных между собой универсальными шарнирами (похожими на карданные). Она призвана передавать вращение от рулевого колеса к рулевому механизму. На многих нынешних автомобилях предусмотрена регулировка угла наклона рулевого колеса и расстояния его вылета. Другими словами, вы можете, перемещая рулевое колесо вверх/вниз и на себя/от себя, установить то положение, которое наиболее близко к идеальному, согласно вашим пожеланиям.
Примечание Для обеспечения высоких показателей пассивной безопасности, к проектированию рулевой колонки относятся так же серьезно, как и, например, к проектированию сиденья. Это связано с тем, что при фронтальном столкновении рулевое колесо не должно смещаться более, чем это допустимо. Поэтому при столкновении рулевая колонка должна складываться или ломаться в определенных местах.
Виды рулевого управления
В зависимости от типа редуктора системы, рулевой механизм (система рулевого управления) может быть следующих видов:
- Реечный – самый распространенный вид, используемый в легковых автомобилях. Этот вид рулевого механизма имеет простую конструкцию и отличается высоким КПД. Недостатки заключаются в том, что этот тип механизма чувствителен к возникающим ударным нагрузкам при эксплуатации в сложных дорожных условиях.
- Червячный – обеспечивает хорошую маневренность автомобиля и достаточно большой угол поворота колес. Этот вид механизма меньше подвержен влиянию ударной нагрузки, но более дорогостоящий в изготовлении.
- Винтовой – принцип работы похож на червячный механизм, однако он имеет более высокий КПД и позволяет создавать большие усилия.
- С гидравлическим усилителем (ГУР). Его основным достоинством является компактность и простота конструкции. Гидравлическое рулевое управление среди современных транспортных средств является одним из наиболее распространенных. Недостатком такой системы является необходимость контроля уровня рабочей жидкости.
- С электрическим усилителем (ЭУР). Такая система рулевого управления с усилителем считается наиболее прогрессивной. Он обеспечивает простоту регулировки настроек управления, высокую надежность работы, экономный расход топлива и возможность управления автомобилем без участия водителя.
- С электрогидравлическим усилителем (ЭГУР). Принцип действия данной системы аналогичен системе с гидравлическим усилителем. Главное отличие заключается в том, что насос усилителя приводится в действие электродвигателем, а не ДВС.
Рулевое управление современного автомобиля может быть дополнено следующими системами:
- Активного рулевого управления (AFS) – система изменяет величину передаточного отношения в зависимости от текущей скорости. Она позволяет корректировать угол поворота колес и обеспечивает более безопасное и устойчивое движение на скользких поверхностях.
- Динамического рулевого управления – работает аналогично активной системе, однако в конструкции в этом случае вместо планетарного редуктора используется электродвигатель.
- Адаптивного рулевого управления для транспортных средств – главной особенностью является отсутствие жесткой связи между рулем автомобиля и его колесами.
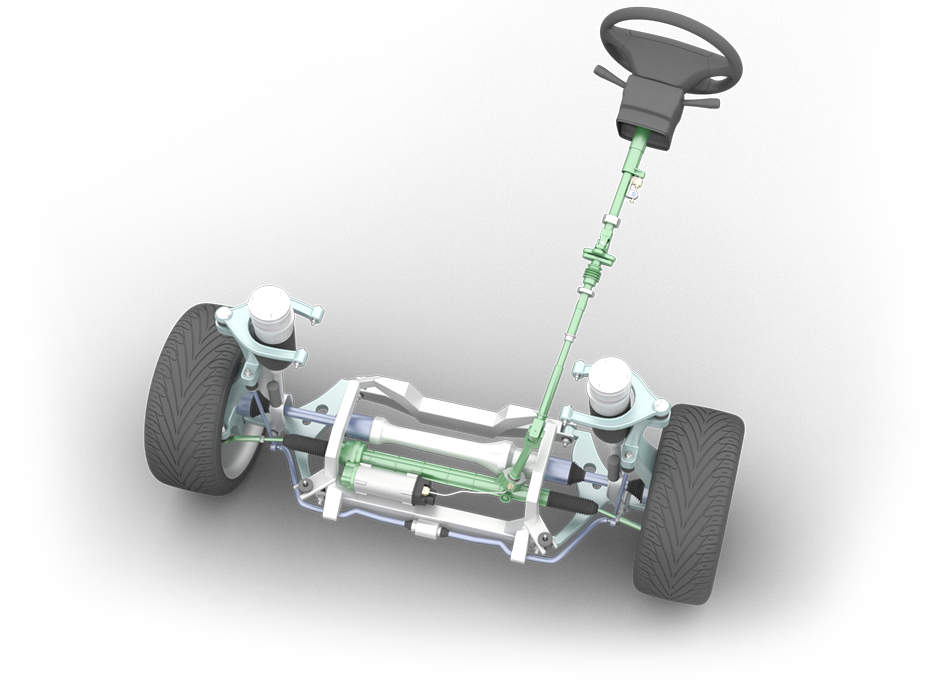
Принцип работы
Каждое ведущее колесо базируется на поворотном кулаке, который соединен с передней осью с помощью так называемого шкворня. Когда водитель крутит руль, усилие от этого при участии рычагов и тяг передается на поворотные кулаки. Они оборачиваются под требуемым углом и таким образом влияют на направление движения.
Для исключения риска бокового скольжения колес в процессе поворота важно, чтобы у описываемых ими окружностей был общий центр, где пересекаются продолжения осей всех приборов транспортного средства. Его называют центром поворота. По этой причине ведущие колеса поворачиваются на разные углы: внешние – на меньший, внутренние – на больший.
По этой причине ведущие колеса поворачиваются на разные углы: внешние – на меньший, внутренние – на больший.
Поворачивая руль, водитель поворачивает колеса, то есть посредством рулевого механизма он передает усилие на тяги и рычаги рулевого привода, которые оказывают прямое воздействие на угол поворота ведущих колес. Учитывая тот факт, что рулевой механизм представляет собой устройство, которое повышает крутящий момент и при этом снижает обороты, он, помимо всего прочего, в разы увеличивает усилие воздействия.
Фактически значение рулевого управления сводится к выполнению им следующих функций:
- Увеличение приложенного к рулю усилия.
- Передача этого усилия на рулевой привод.
- Самостоятельный возврат руля в исходное положение после снятия нагрузки.
По сути, рулевой механизм представляет собой механическую передачу, основным параметром которой следует считать передаточное число.
Различные используемые схемы
Тип рулевого управления в основном определяется способом преобразования в рулевом механизме. Выделяются три основных варианта:
- Реечное управление встречается наиболее часто и практически на всех легковых автомобилях. В силу своей конфигурации оно хорошо компонуется и обеспечивает высокую точность управления. Возможно использование переменного передаточного числа в зависимости от угла поворота (прогрессивная характеристика). Удобно сочетается со всеми видами усилителей и демпферов. Они же максимально парируют основной недостаток в виде излишней прозрачности – удары могут передаваться на руки водителя с большой травмирующей силой. Конструкция также минимизирует состав набора рулевых тяг и наконечников.
- Рулевое управление типа «червяк-глобоидальный ролик». Повсеместно применялось в прошлом, пока не было вытеснено реечным механизмом. Отличалось компактностью, хорошим блокированием обратных ударов и высокой прочностью. Вместе с тем создавало трудности с точностью управления и стабильностью характеристик во времени. Сохраняется на грузовиках и вездеходах.
- Механизм типа «винт-шариковая гайка» характеризуется пониженным трением и способностью выдерживать высокие нагрузки. Представляет собой значительно усовершенствованный предыдущий вариант, но работает гораздо лучше и широко используется на дорогих и тяжёлых автомобилях престижного класса, а также на больших грузовиках.

Все данные механизмы снабжаются усилителями. Они в своей работе могут использовать электрические, гидравлические и смешанные принципы.
- Электрический усилитель руля (ЭУР) находит всё большее применение на легковых автомобилях. Здесь важны такие его свойства, как компактность, быстродействие и точность. В последнее время стало особенно важным лёгкое подключение рулевого управления через ЭУР к компьютерам автомобиля, осуществляющим помощь водителю с элементами полностью автономного управления. Машины уже умеют самостоятельно парковаться, отслеживать разметку и следовать потоку без вмешательства человека. Через изменение усилия на руле также возможно передавать водителю информацию о его ошибках и рекомендации.
- Гидроусилитель руля (ГУР) был самым массовым и до сих пор ещё применяется по разным причинам, хотя в целом уступает по функциональности электрическим. Отличается высокой мощностью благодаря прямому приводу от двигателя и надёжностью, поскольку применялся давно и широко. Недостатки связаны с наличием текучей жидкости и многочисленных уплотнений. Управлять им от компьютеров сложно, но один выход всё же есть.
- Электрогидравлический гибридный усилитель (ЭГУР) частично избавляет от этого недостатка, поскольку в нём рабочее давление создаётся электрическим насосом, которым достаточно легко управлять. Но некоторая инертность всё же остаётся, также сохраняются все недостатки гидравлики.
Усовершенствование рулевых механизмов идёт по пути максимального внедрения в них принципов автоматического управления. Существуют системы типа AFS, где по команде компьютера можно оперативно менять суммарное передаточное число рулевого редуктора. Для этого используется дополнительная передача планетарного типа, где венец можно вращать отдельным электродвигателем. Электромоторы могут выполнять и иные функции, вплоть до полного устранения жёсткой связи между рулевым колесом и управляемыми колёсами. Подобно тому, как электричество и гидравлика берут на себя перемещение управляющих элементов в авиации и тяжёлой грузовой технике. Уровень надёжности и дублирование вполне это позволяют. При этом руление становится полностью адаптивным и помощь водителю максимальна.
Регулировка
Однозначно можно сказать, что рулевое управление нуждается в регулировке. Как правило, это касается черявичого элемента или шестерни-рейки. Именно в этих механизмах появляется люфт, что влияет на износ остальных деталей устройства. Если вовремя не регулировать РУ, то это может привести к полому рейки и большим денежным потерям. Для того, чтобы выполнить данную процедуру, необходимо обратиться к специалистам на СТО, которые проведут ее точно по регламенту производителя. Самостоятельно же, при наличии соответствующих навыков, можно менять лишь ряд деталей, например, подшипники.


Устройство и принцип работы системы AFS
. Конструкция достаточно простая и отличается неплохим КПД передачи крутящего момента руля (устанавливают на авто с независимой подвеской). Основой служит рулевая рейки с шестерней, сама же шестерня устанавливается на вал и постоянно находится в сцеплении с рейкой.
Вращая руль, рейка за счет шестеренки перемещается в горизонтальном положении влево или вправо. Тяги, прикрепленные к рейке, так же перемещаются в соответствии с поворотом руля, тем самым передавая усилия на колеса и поворачивая их по сторонам. Основные плюсы в самом строении, меньше тяг и шарниров, компактность, невысокая цена обслуживания, простота конструкции и надежность. Есть и минусы, редуктор такого механизма весьма чувствительный к неровностям на дороге, за чет чего любой удар колеса передается на руль.
Второй вид механизма –
. Считается самым старым видом среди существующих вариантов. Чаще всего встречается на классических, отечественных автомобилях, а так же на машинах с повышенной проходимостью. Как правило, подвеска таких автомобилей зависимая. От предыдущего вида червячный механизм отличается наличием червячного ролика, вместо шестерни, картера, а так же рулевой сошки.
Последний из видов рулевого управления –
. В отличие от двух предыдущих видов, механизм соединяется с помощью гайки и шариков специального винта. Как показывает практика, износ такого механизма минимальный, а детали ломаются очень редко.
Чаще всего винтовой механизм применяют на грузовых автомобилях, автобусах и легковых автомобилях представительского класса с повышенным комфортом и безопасностью. По принципу работы винтовой подвид работает так же, как и червячный, передавая момент прокручивания руля через червячную передачу.
Соответственно с зашитой логикой и программой блоки управления создают управление исполнительными механизмами как сервопривод рулевого механизма, сервопривод колес и электромагнитное сцепление возле руля. Рассмотрим механизмы и их назначение по отдельности. Благодаря сервоприводу рулевого механизма колеса повернутся на определенный угол, как правило, на каждое колесо инженеры установили свой сервопривод.
Для симуляции реальности поворота руля с усилием используется сервопривод руля, создается ощущения скольжения колес по дороге. Одним из важных элементов безопасности является электромагнитное сцепление. Во время подачи электроэнергии сцепление будет в разомкнутом состоянии, а рулевое управление будет проходить по проводам.
Принцип работы не такой то и сложный, когда водитель начинает вращать руль, датчик поворота руля считывает угол изменения положения и передает информацию на блоки управления. Далее идут расчеты, насколько нужно повернуть передние колеса. Таким образом, сервопривод перемещает рулевую рейку и обеспечивает поворот колес в соответствии с рассчитанным углом.
В это же время, рассчитав угол поворота, блок управления посылает обратно на сервопривод руля сигнал и имитирует усилие поворота колес. Как видим принцип работы механизма не сложный, но все же требует большой точности механизмов и их согласованности. Кроме этого стоит следить за исправностью всего механизма.
Самая главная функций эпициклической шестерни — изменение передаточного отношение, которое может достигать 1:10 при максимальной скорости вращения в определенном направлении. При этом руль становится острым, а углы поворота влево и вправо до упора уменьшаются, благодаря чему достигается больший комфорт в управлении.
При росте скорости движения, электродвигатель вращается медленней и передаточное отношение рулевого механизма уменьшается. В конечном итоге, электродвигатель прекращает свое вращение, это происходит на скорости в 180-200 км/ч, а усилие от рулевого колеса передает напрямую на рулевой механизм.
Если вдруг при повороте, будет зафиксирована избыточная поворачеваемость (потеря сцепления задних колес с поверхностью), то система динамической стабилизации DSC автоматически корректирует углы повороты передних колес. Также система стабилизирует движения автомобиля на скользкой дороге или при торможении.

Дальнейшее включение электромотора осуществляется с набором скорости, при этом его ротор вращается в обратную сторону. Величина передаточного числа равняется 1:20, многократно снижается острота руля и возрастает величина его оборотов, что позволяет в разы увеличить управляемость транспортным средством во время езды при высоком скоростном режиме.
Напоследок отметим, что система AFS постоянно находится в рабочем состоянии. Отключить ее невозможно.



