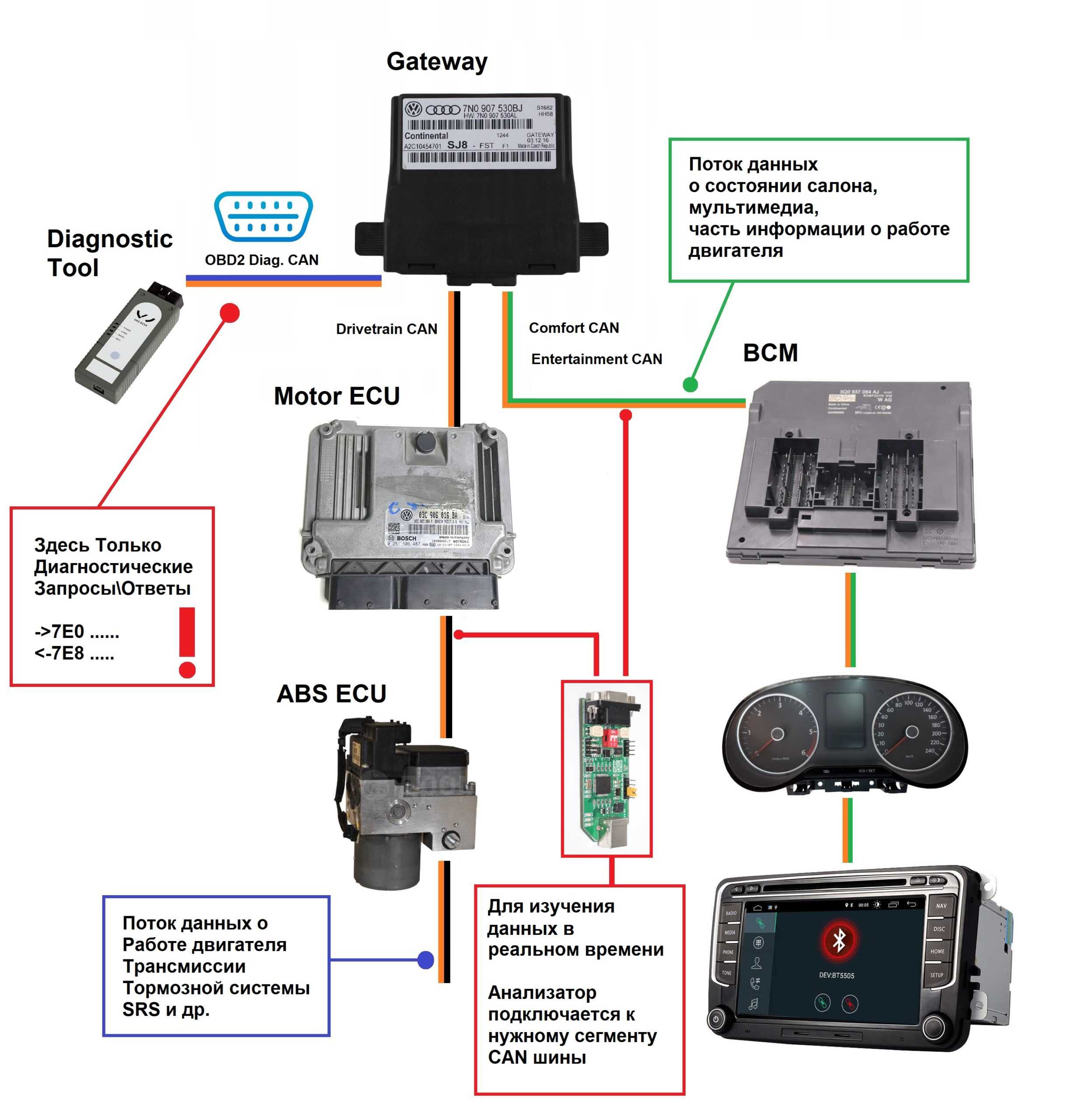
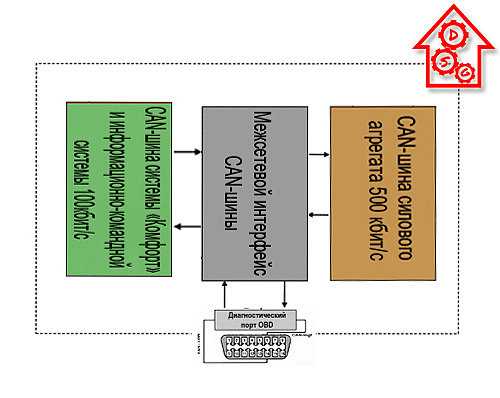
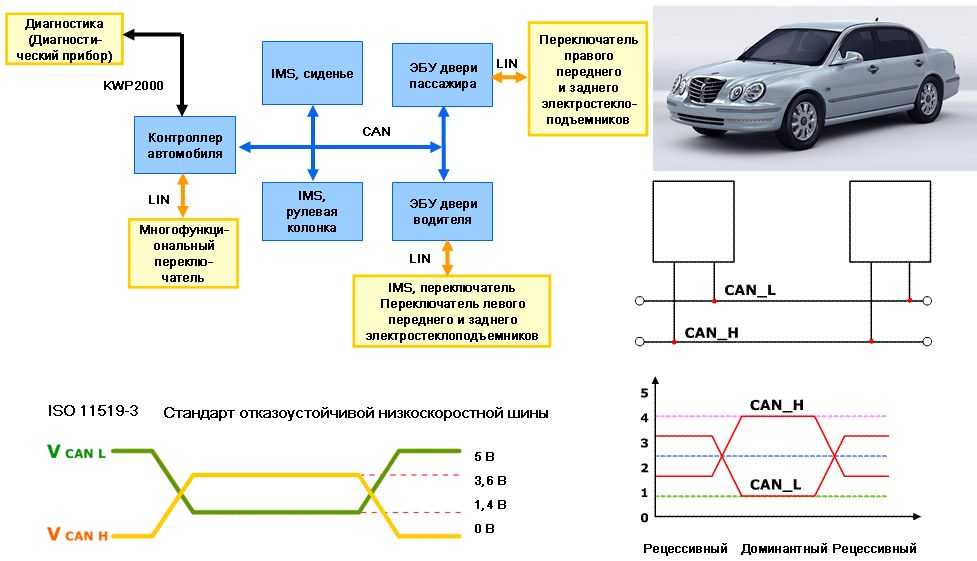
Сегментация CAN шины по функциональному назначению
Как правило разные, сегменты сети разделены специальным устройством, которое называется Гейтвей (Gateway, ZGW, ETACS, ICU) .
В роли гейтвея может выступать панель приборов (для простых автомобилей) или отдельный специальный модуль межсетевого интерфейса.
Гейтвей разделяет потоки данных в разных сегментах сети и обеспечивает связь сегментов сети работающих на разных скоростях.
ВАЖНО: На многих автомобилях (особенно VAG, MB, BMW) CAN шина в диагностическом разъеме OBD2 отделена от других участков сети при помощи гейтвея, поэтому подключившись к CAN шине OBD разъема невозможно увидеть поток данных. В этом случае можно увидеть только обмен между диагностическим инструментом и автомобилем во время процесса диагностики! Так же модулем гейтвеем оборудованы автомобили японских марок с 2021..2018 годов в зависимости от модели.
ОБЯЗАТЕЛЬНО изучайте схемы на исследуемый автомобиль, чтобы знать к какому сегменту сети Вы подключаетесь!. Схема ниже изображена в общем виде для упрощения понимания роли Гейтвея
Количество CAN шин и варианты включения блоков управления к тому или другому сегменту сети могут отличаться
Схема ниже изображена в общем виде для упрощения понимания роли Гейтвея. Количество CAN шин и варианты включения блоков управления к тому или другому сегменту сети могут отличаться.
Разновидности CAN
В настоящее время доступны различные устройства с CAN-интерфейсом, которые помимо передачи данных из одной точки в другую позволяют реализовать синхронизацию процессов и обслуживание по приоритетам. Более ранние реализации CAN-контроллеров используют кадры с 11-разрядным идентификатором и возможностью адресации до 2048 сообщений и соответствуют спецификации CAN V. 2.0A. Такие контроллеры носят название Basic CAN и характеризуются сильной загруженностью центрального процессора (ЦПУ), так как каждое входящее сообщение запоминается в памяти и ЦПУ решает, нужны ему данные сообщения или нет (рис. 4). Контроллеры Basic CAN содержат один передающий буфер и один или два приемных буфера сообщений. Чтобы послать или получить сообщение, требуется задействовать ЦПУ через прерывания «сообщение_послано» и «сообщение_получено». В результате проверки каждого входящего сообщения загрузка ЦПУ очень велика, что ограничивает реальную скорость обмена по сети. По этой причине такие контроллеры используются в сетях CAN с низкой скоростью обмена и/или малым количеством сообщений.
Рис. 4. Структура контроллера Basic CAN
Большинство выпускаемых сегодня CAN-контроллеров используют расширенные кадры сообщений с идентификатором длиной 29 разрядов, что позволяет адресовать до 536 млн сообщений. Такие контроллеры соответствуют спецификации CAN V. 2.0B (active) и называются контроллеры Full-CAN. В них предусмотрен буфер для нескольких сообщений, причем каждое сообщение имеет свою маску, и фильтрация осуществляется по соответствию идентификатора маске.
В случае Full-CAN ЦПУ максимально разгружено, поскольку не обрабатывает ненужные сообщения (рис. 5). При приеме сообщения с идентификатором, соответствующим маске, оно запоминается в специальной зоне двухпортового ОЗУ, и работа ЦПУ прерывается. Full-CAN имеет также специальный тип сообщения, которое означает: «у кого бы ни находилась эта информация, пожалуйста, пошлите ее сейчас же». Контроллер Full-CAN автоматически прослушивает все сообщения и посылает запрошенную информацию.
Рис. 5. Структура контроллера Full-CAN
До недавнего времени в промышленности был широко распространен Basic CAN с 11-разрядным идентификатором. Этот протокол допускает простую связь между микроконтроллерами и периферийными устройствами при скорости обмена вплоть до 250 Кбит/с. Однако при стремительном удешевлении CAN-контроллеров использование Full-CAN стало оправданным и для связи с медленными устройствами. Если в промышленных приложениях требуется высокоскоростной (до 1 Мбит/с) обмен данными, то непременно следует использовать Full-CAN.
Передача сигналов
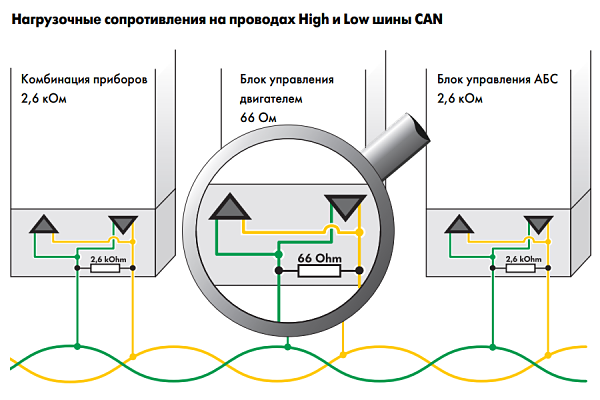
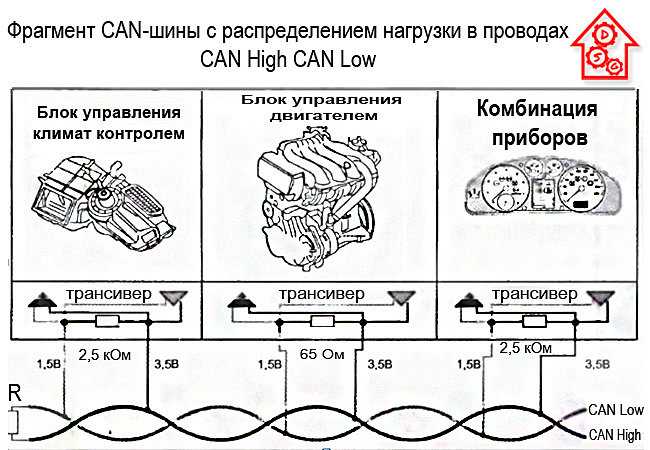
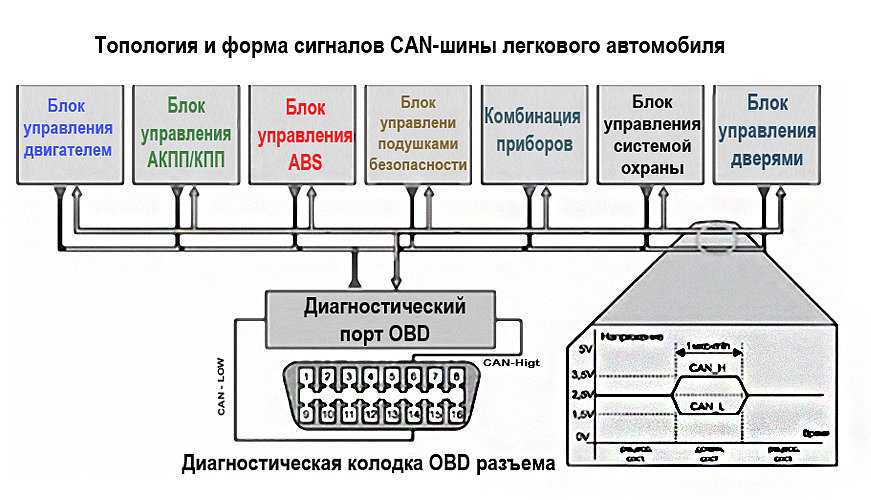
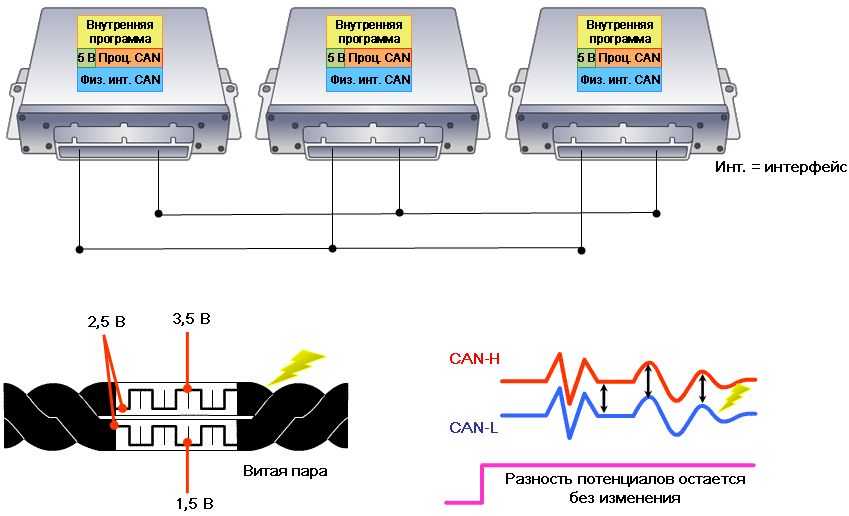
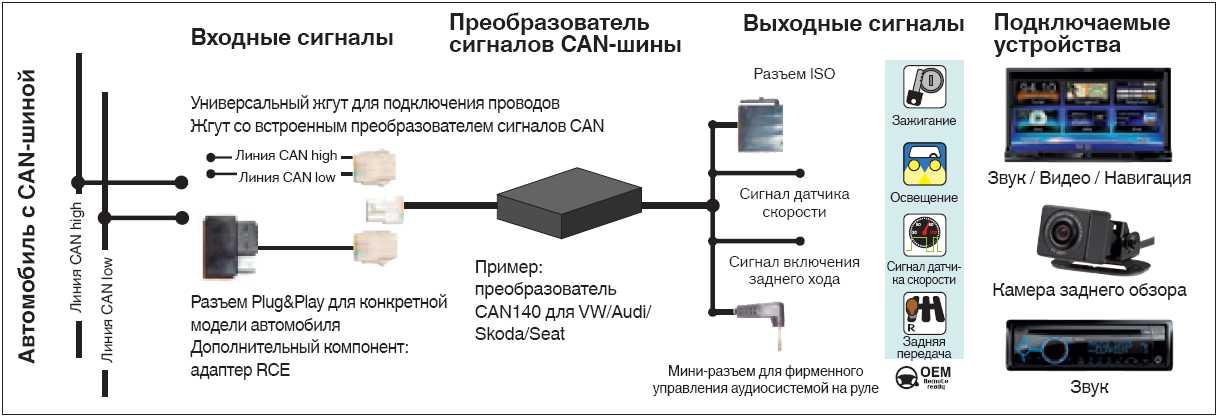
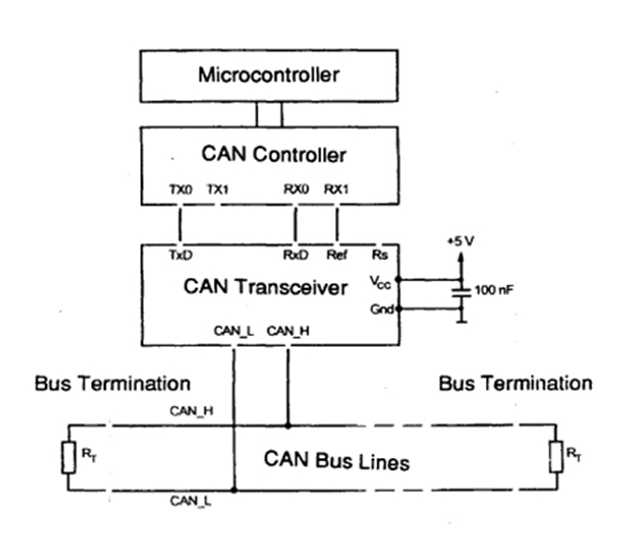
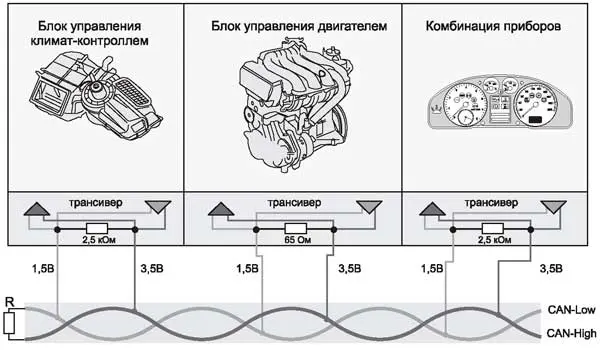
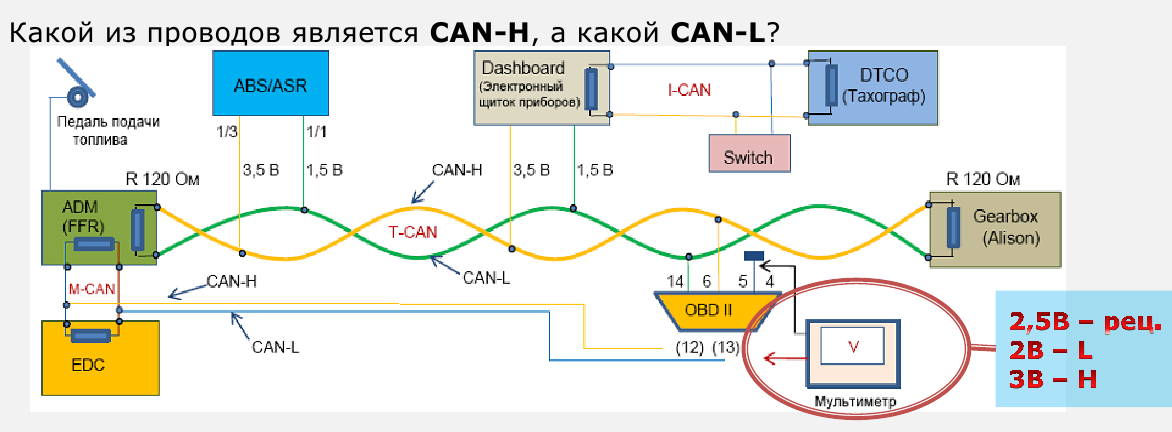
Физически проводник CAN-шины современного автомобиля выполнен из двух составляющих. Первый — черного цвета и называется CAN-High. Второй проводник, оранжево-коричневый, именуется CAN-Low. Благодаря представленной структуре коммуникаций из схемы автомобиля удалена масса проводников. При производстве транспортных средств это позволяет уменьшить вес изделия до 50 кг.

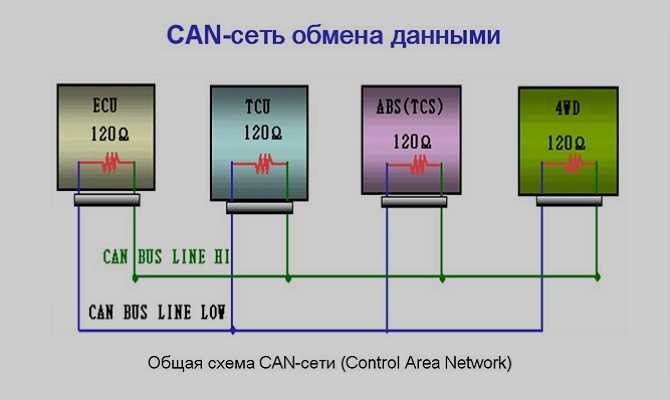
Общая сетевая нагрузка состоит из разрозненных сопротивлений блоков, которые входят в состав протокола, называемого КАН-шина.
Различны и скорости передачи-получения каждой системы. Поэтому обеспечивается обработка разнотипных сообщений. Согласно описанию шины-CAN, эту функцию выполняет преобразователь сигналов. Он называется межсетевым электронным интерфейсом.
Расположен этот прибор в конструкции управляющего блока, но бывает выполнен в виде обособленного прибора.
Представленный интерфейс применяют также для вывода и ввода сигналов диагностического характера. Для этого предусмотрено наличие унифицированной колодки OBD. Это особый разъем для диагностики системы.
Физические составляющие
Устройство шины состоит, помимо кабеля, из нескольких элементов.
Микросхемы приемопередатчика часто встречаются от компании Philips, а также Siliconix, Bosch, Infineon.
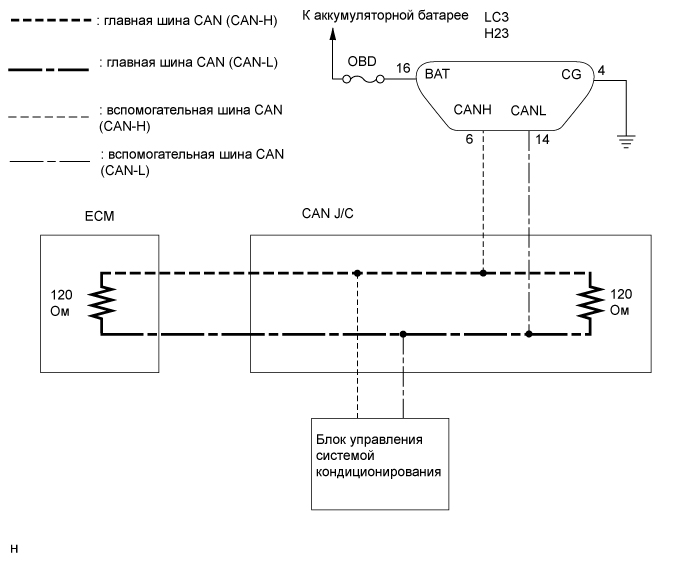
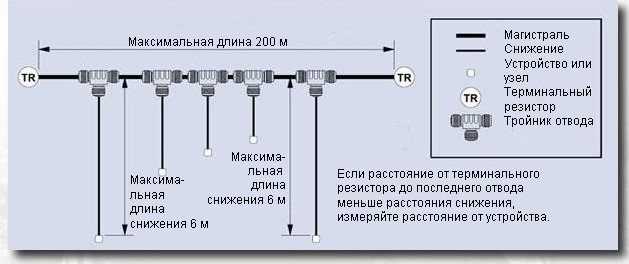
Чтобы понять, что такое КАН-шина, следует изучить ее компоненты. Максимальная длина проводника при скорости 1 Мбит/с достигает 40 м. Шина- CAN (известная еще как CAN-BUS) в конце наделена терминатором.
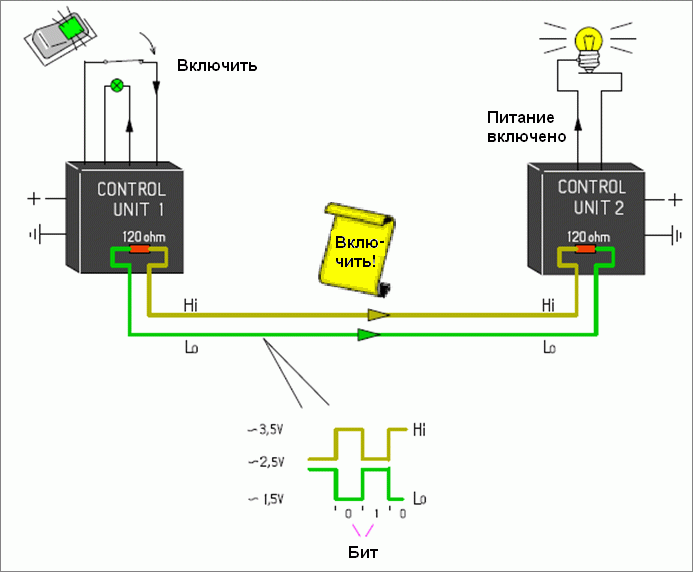
Для этого на конец проводников устанавливаются резисторы сопротивления по 120 Ом. Это необходимо, дабы устранить отражения сообщения на конце шины и убедиться, что она получает соответствующие уровни тока.
Сам проводник в зависимости от конструкции может быть экранированным или неэкранированным. Концевое сопротивление может отходить от классического и находиться в диапазоне от 108 до 132 Ом.
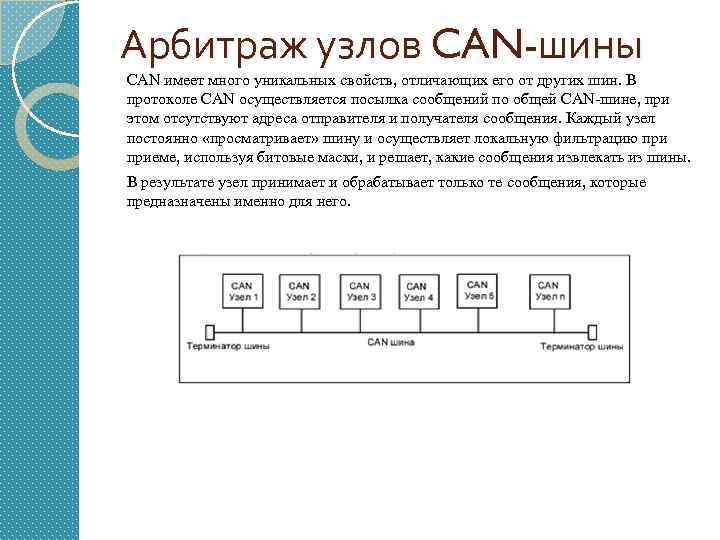
Что такое CAN шина и принцип работы
Автомобильный электронный КАН модуль представляет собой сеть контроллеров, предназначенных для объединения всех управляющих блоков машины в одну сеть. Основная особенность заключается в том, что объединение элементов происходит с использованием одного проводника. Сам цифровой интерфейс на авто включает в себя пару кабелей, именуемых CAN. Информация, которая поступает по каналам от одного блока к другому, передается в зашифрованном виде.
Где находится устройство
Место установки CAN шины зависит от конкретной модели автомобиля, этот момент надо уточнять в сервисном руководстве к машине. Он может располагаться в моторном отсеке или в салоне, под панелью приборов. Подробно на фото показаны примеры расположения КАН интерфейсов.
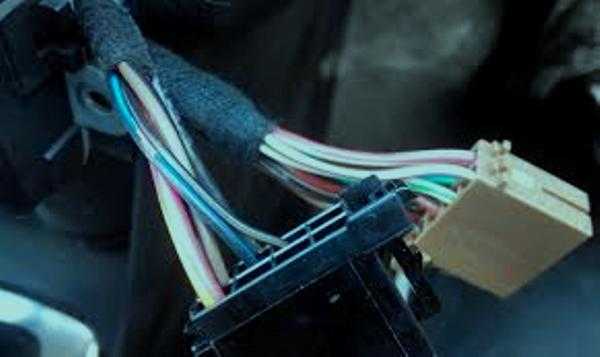
Кан модуль в одном из жгутов со штатной проводкой
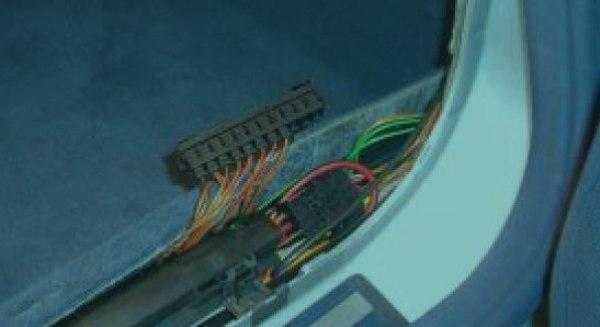
Расположение шины в багажном отсеке

Шина КАН под приборной панелью автомобиляОбычно блок управления сигнализацией ставится под контрольным щитком либо за «приборкой» в салоне машины.
Функции
Функции, выполняющиеся интерфейсом КАН:
- возможность подключать к электросети транспортного средства и настраивать любые устройства, в том числе автосигнализации;
- более упрощенный алгоритм подключения и работы дополнительного оборудования и систем, установленных в автомобиле;
- возможность одновременной передачи и получения цифровой информации и ее анализа от различных источников;
- снижение величины воздействия внешних помех на работу основных и дополнительных систем;
- более быстрое подключение функции автозапуска противоугонной системы;
- ускорение процесса передачи данных к конкретным устройствам и механизмам машины.
Режимы
Цифровая система может функционировать в нескольких режимах:
- Автономный или фоновый. При его активации все системы выключены, но на КАН интерфейс подается питание. Значение напряжения достаточно низкое, поэтому такой режим работы не позволит разрядить АКБ.
- Режим пуска. Он работает, когда водитель устанавливает ключ в замок и прокручивает его в положение зажигания либо кликает по кнопке Старт/Стоп. Производится включение функции стабилизации питания. Напряжение начинает поступать на датчики и регуляторы.
- Активный режим функционирования. При его включении обмен информации начинает происходить между всеми датчиками и регуляторами. Когда активирован активный режим, значение потребления энергии может возрасти до 85 мА.
- Режим отключения либо засыпания. При остановке мотора все датчики и системы, подключенные к интерфейсу КАН, перестают работать. Производится их отключение от электросети машины.
Характеристики
Отдельно следует сказать об основных характеристиках скорости работы интерфейса:
- общая величина скорости передачи данных с информацией составляет 1 мб/с;
- при отправке информации между микропроцессорными устройствами этот показатель составит 500 кб/с;
- скорость получения данных к автомобильной системе «Комфорт» составляет 100 кб/с.
интерфейсControl Area Network
CAN (Control Area Network) — последовательная магистраль, обеспечивающая увязку в сеть «интеллектуальных» устройств ввода/вывода, датчиков и исполнительных устройств некоторого механизма или даже предприятия. Характеризуется протоколом, обеспечивающим возможность нахождения на магистрали нескольких ведущих устройств, обеспечивающим передачу данных в реальном масштабе времени и коррекцию ошибок, высокой омехоустойчивостью. Система CAN обеспечена большим количеством микросхем, обеспечивающих работу подключенных к магистрали устройств, разработку которых начинала фирма BOSH для использования в автомобилях, и в настоящее время широко используемых в автоматизации промышленности. Цеколёвка разема приведена на рисунке.
|
Стандарт |
ISO 11898 |
|
Скорость передачи |
1 Мбит/с (максимум) |
|
Расстояние передачи |
1000 м (максимум) |
|
Характер сигнала, линия передачи |
дифференциальное напряжение, скрученная пара |
|
Количество драйверов |
64 |
|
Количество приемников |
64 |
|
Схема соединения |
полудуплекс, многоточечная |
-
Предназначен для организации высоконадежных недорогих каналов связи в распределенных системах управления. Интерфейс широко применяется в промышленности, энергетике и на транспорте. Позволяет строить как дешевые мультиплексные каналы, так и высокоскоростные сети.
-
-
Скорость передачи задается программно и может быть до 1 Мбит/с. Пользователь выбирает скорость, исходя из расстояний, числа абонентов и емкости линий передачи.
|
Расстояние, м |
25 |
50 |
100 |
250 |
500 |
1000 |
2500 |
5000 |
|
Скорость, Кбит/с |
1000 |
800 |
500 |
250 |
125 |
50 |
20 |
10 |
-
Максимальное число абонентов, подключенных к данному интерфейсу фактически определяется нагрузочной способностью примененных приемопередатчиков. Например, при использовании трансивера фирмы PHILIPS PCA82C250 она равна 110.
-
Протокол CAN использует оригинальную систему адресации сообщений. Каждое сообщение снабжается идентификатором, который определяет назначение передаваемых данных, но не адрес приемника. Любой приемник может реагировать как на один идентификатор, так и на несколько. На один идентификатор могут реагировать несколько приемников.
-
Протокол CAN обладает развитой системой обнаружения и сигнализации ошибок. Для этих целей используется поразрядный контроль, прямое заполнение битового потока, проверка пакета сообщения CRC-полиномом, контроль формы пакета сообщений, подтверждение правильного приема пакета данных. Хемминговый интервал d=6. Общая вероятность необнаруженной ошибки 4.7×10-11.
-
Система арбитража протокола CAN исключает потерю информации и времени при «столкновениях» на шине.
-
Интерфейс с применением протокола CAN легко адаптируется к физической среде передачи информации. Это может быть дифференциальный сигнал, оптоволокно, просто открытый коллектор и т.п. Несложно делается гальваническая развязка.
-
Элементная база, поддерживающая CAN, широко выпускается в индустриальном исполнении.
2. Основные характеристики протокола
-
каждое сообщение имеет определенный приоритет
-
существуют гарантированные времена ожидания
-
гибкость конфигурации
-
групповой приём с временной синхронизацией
-
система непротиворечивости данных
-
multimaster
-
обнаружение и сигнализация ошибок
-
автоматическая ретрансляция разрушенных сообщений
-
различие между временными ошибками и постоянными отказами узлов и автономное отключение дефектных узлов
CAN шина — что это такое?
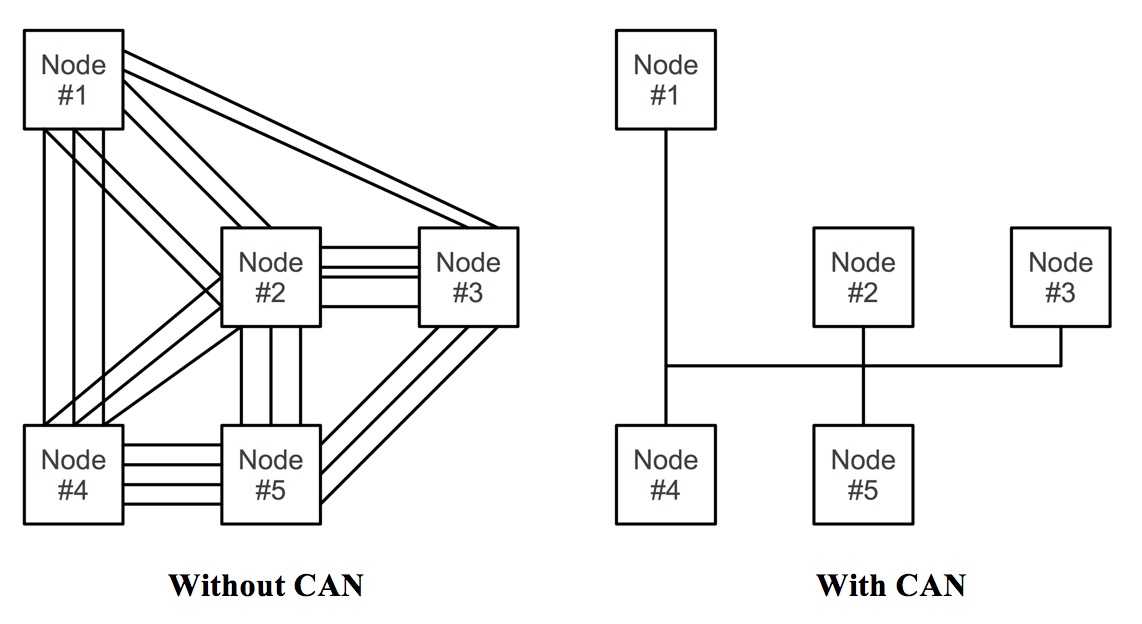
CAN – шина («кан шина») является системой управления всеми электрическими приборами и цифровой связи в автомобиле, которая может получать информацию от устройств, между ними обмениваться данными, а также ими управлять. Данные о техническом состоянии и управляющие сигналы идут в цифровом виде по витой паре благодаря специальному протоколу. От бортовой сети автомобиля к каждому потребителю идёт питание, но все они соединены параллельно. Такой вариант повысил надёжность всей электросхемы, снизил количество проводов и упростил монтаж.


Что такое CAN шина.
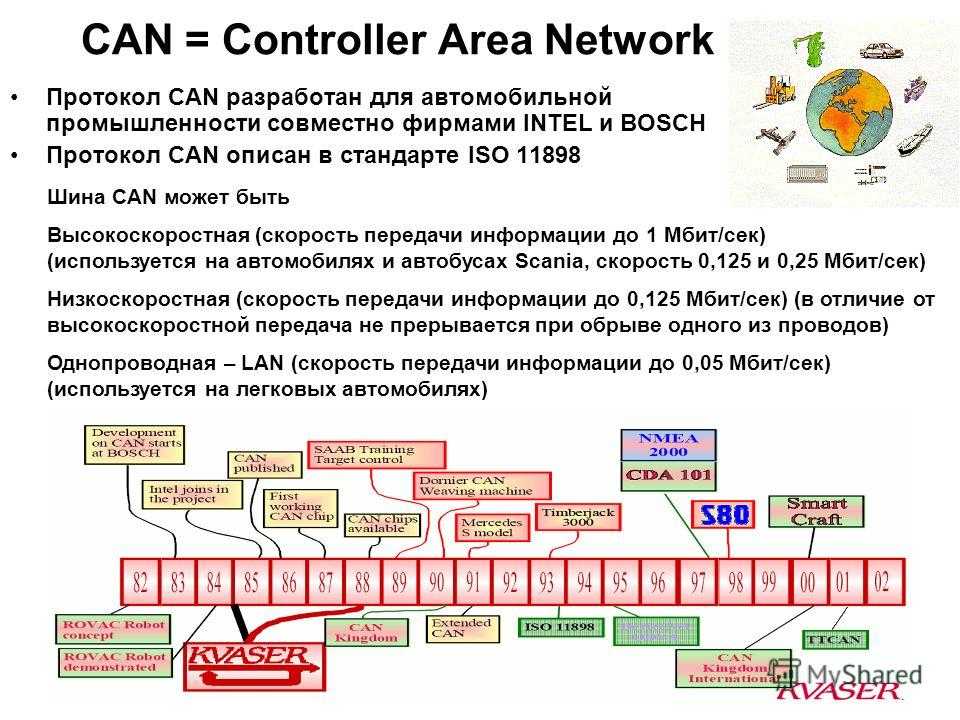
История появления CAN началась в середине 80-х годов прошлого века. Компания bosсh совместно с компанией intel разработали новый цифровой интерфейс для передачи данных — Controller Area Network (CAN).
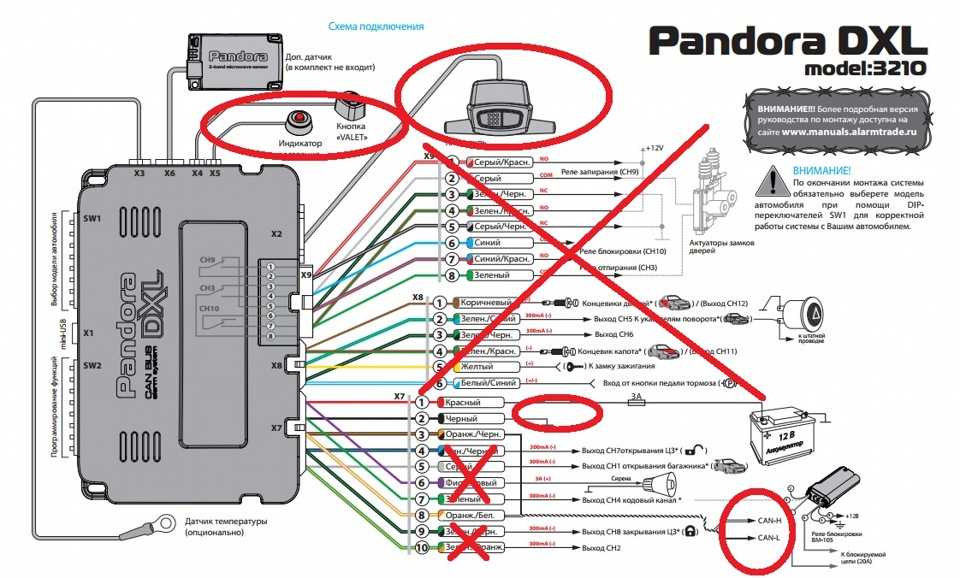
Аналоговое подключение сигнализации (без CAN шины)
Зачем нужна CAN шина в автомобиле.
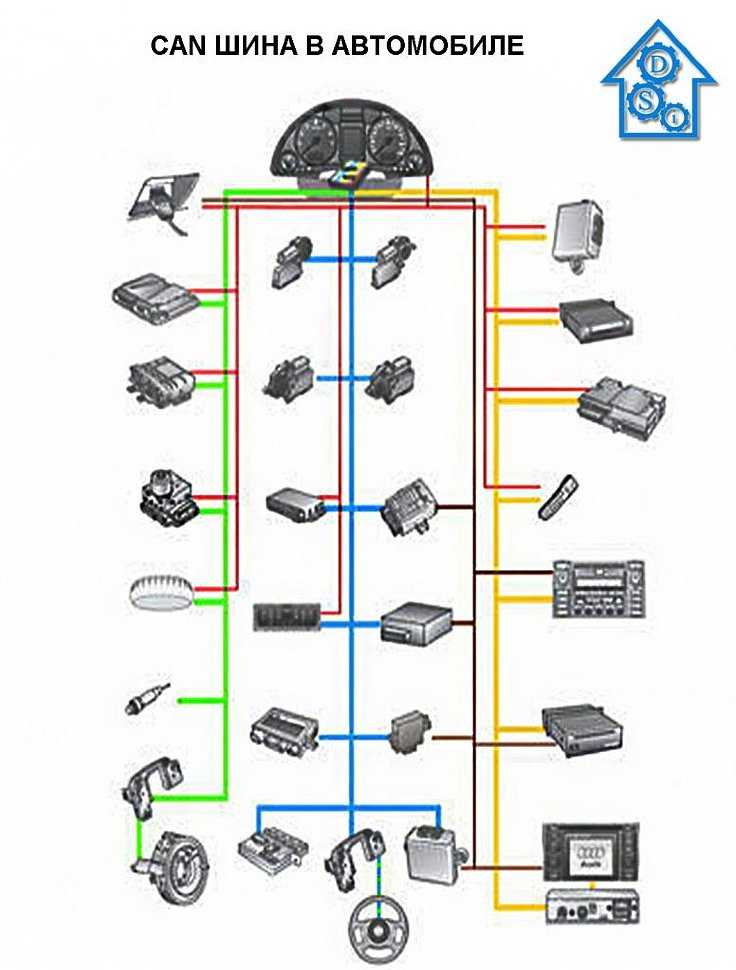
CAN шина позволяет соединить между собой любое количество датчиков, контроллеров, исполнительных элементов и прочих блоков, находящихся в автомобиле (например: системы ABS,SRS AIRBAG, ESP, иммобилайзер, блок управления двигателем, климат, КПП, центральный замок, свет, подвеска, приборная панель и т.д…) в дуплексном режиме (приём и передача данных) со скоростью до 1 Мбит/с. При этом сама can шина состоит всего из двух проводов (витая пара). Ранее для соединения блоков необходимо было использовать сотни проводов т.к. передача единицы информации от блока к блоку осуществлялась по отдельному проводу.
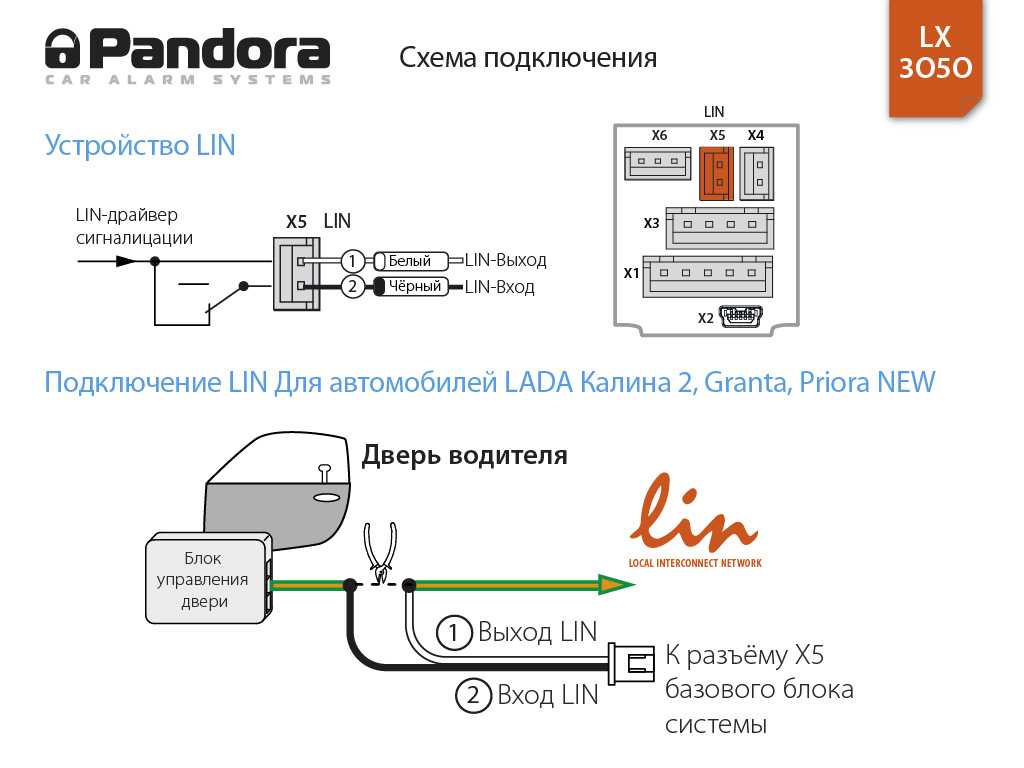
Установка сигнализации по CAN шине
Автосигнализации c CAN модулем.
CAN модуль
Современные автосигнализации производятся с интегрированным CAN модулем, что позволяет подключать автомобильную сигнализацию непосредственно к цифровой шине автомобиля CAN. Автосигнализация получает в цифровом виде информацию о состоянии концевиков, замков, зажигания, ручника, тахометра и т.д. а также может управлять замками дверей, стеклоподъемниками, люком, штатной сигнализацией и некоторыми другими системами автомобиля. позволяет значительно сократить вмешательство в штатную электропроводку (подключения производятся всего к 6-8 проводам, вместо 15-20 в варианте без использования can шины) и позволяет избежать проблем с гарантией на электрооборудование автомобиля.
Бортовые системы электроники в современных легковых и грузовых автомобилях обладают огромным количеством дополнительных устройств и исполнительных механизмов. Для того, чтобы обмен информацией между всеми устройствами был максимально эффективен, в автомобиле должна быть надежная коммуникационная сеть. В начале 80-ых годов 20 века компания Bosch и разработчик Intel предложили новый сетевой интерфейс – Controller Area Network, который в народе называется Can-шина.
Работа с терминалом
Перед эксплуатацией надо учесть рекомендации по использованию, которые указываются в сервисном руководстве. Предварительно производится настройка устройства.
Варианты настройки
Если используется терминал, есть два варианта настроить работу интерфейса:
- С помощью специальной программы «Конфигуратор» для компьютера. При запуске утилиты надо перейти во вкладку «Настройки» и выбрать пункт CAN. В открывшемся окне указываются необходимые параметры.
- Используя команды «CanRegime». Обычно этот вариант применяется для дистанционной настройки с использованием СМС-сообщений. Могут применяться команды, которые отправляются из программного обеспечения для мониторинга.
Подробнее о командах, которые указываются после CanRegime:
Mode — определяет режим функционирования. Если показана цифра 0 — то цифровой интерфейс отключен, если 1 — используется стандартный фильтр. Цифры 2 и 3 указывают на принадлежность пакетов к 29- либо 11-битному классу.
BaudRate. Команда предназначена для определения скорости работы цифрового интерфейса
Важно, чтобы этот параметр соответствовал скорости передачи информации в авто.
TimeOut — определяет время ожидания для каждого сообщения. Если полученная величина слишком низкая, то цифровой интерфейс сможет отловить не все передающиеся сообщения.
Потенциальные проблемы
Так как шина находится в связи с большим количеством элементов, то некорректная работа способна приводить к негативным результатам эксплуатации. Это может сказаться не только на работоспособности авто, но и на безопасности вождения.
Сообщать о неисправности система может косвенными признаками
Водителям стоит на нее обратить внимание, в следующих случаях:
- загорелся индикатор Check Engine;
- беспричинно практически одновременно бортовой щиток засветился несколькими иконками, например, стояночный тормоз, подушки безопасности, высокое давление смазки и пр.
- считывание информации на приборной доске стало невозможным, так как не выводится информация о температуре охлаждения, уровне топлива и пр.
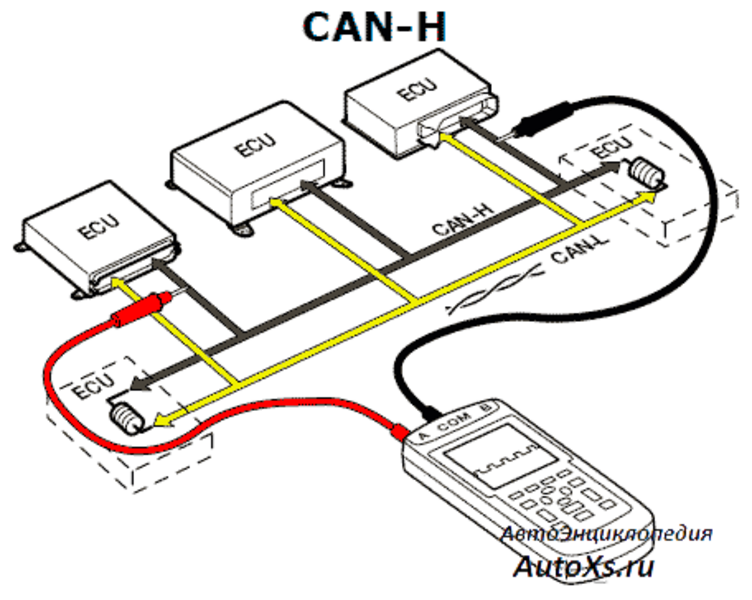
Необходимо заняться обязательным более точным тестирование. Квалифицированно его смогут провести на станции техобслуживания, потому что автосервисы оснащены профессиональным оборудованием.
Обзор возможностей протокола CAN
- Продукты — микросхема, инструменты разработки, модули, инструменты проектирования;
- Распределение посланий — каждый участник будет иметь возможность выбирать к просмотру сообщения, касающиеся только его. Для этого предусмотрены фильтры;
- Широковещательный характер – если участник не выбрал только свои сообщения, то он имеет возможность просмотра всего потока информации;
- Контентная адресация – нет явного адресата. Выбираются адреса контента по идентификатору в самом сообщении;
- Виды сообщений – кадр данных, удаленный, ошибки, перезагрузки;
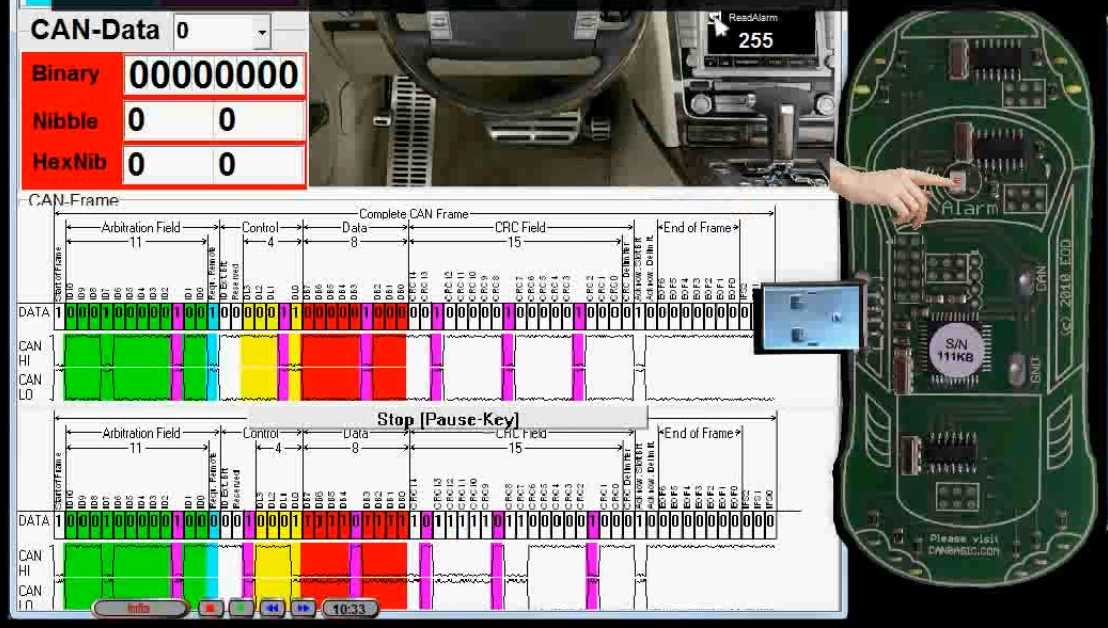
- Стандартный CAN и его расширенная версия – отличаются длиной установленного идентификатора. Если в станд. варианте он равен 11битам, то в его «толстом» собрате – 29 бит;
- Конфликтное разрешение и определение приоритета – чтобы избежать одновременной передачи данных несколькими участниками, выработан арбитражный механизм. Все пакеты поделены на доминантный и рецессивный. Не вдаваясь в подробности, отметим только, что всегда приоритет на стороне доминантного сообщения.
- Физические уровни:
— сигнальная сбалансированная двухпроводная схема high–speed CAN представляет вторую часть стандарта ISO 11898;
— третья часть ISO 11898 составляет следующий уровень вышеназванной схемы;
— однопроводной уровень, описываемый стандартом SAE J2411. Шины этого уровня установлены, например, на автомобилях линейки Дженерал Моторс.
- Прерывание конца – CAN-шина должна содержать на конце резисторное сопротивление (120ОМ), для гашения отражения сигнала, создания уровня постоянного тока.
- Кабель – сопротивление должно укладываться в интервал 108 – 132ОМ.
- Разъем – нет стандартов для разъемов CAN. Каждый протокол описывает свои предпочтения. Однако есть фактический стандарт для автопромышленности.
- Ошибка – контролер найдет ее и отметит флажком, разрушая передачу. Эти флажки станут знаком для всех участников цепи на ее сброс.
- Сбои в передачи – при различных сбоях дается возможность дальнейшего функционирования. Сбои могут быть разного характера: прерывание, короткое замыкание в разных частях, разъединение с оконечным сопротивлением.
Устройство шины и где располагается
Визуально CAN является блоком из пластика, внутри которого располагаются печатные платы. С внешней стороны шины чаще всего находится универсальный разъем, предназначенный для подсоединения различных кабелей.
За цифровой интерфейс отвечают встроенные проводники, которые принято называть CAN. Подключение осуществляется через специальный кабель.
В разных марках автомобилей шины расположены могут быть в разных местах. Конкретную область, где вмонтирован блок, можно узнать из инструкции по эксплуатации автомобиля. Чаще всего такую электронику располагают в салоне транспортного средства, скрывая ее контрольным щитом. В некоторых брендах принято устанавливать электронный узел в подкапотной области.
Для чего нужен КАН-модуль в автосигнализации
По мере усложнения штатной электропроводки автомобилей классическое «аналоговое» подключение сигнализаций становится все менее актуальным. При подключении «по аналогу» необходимо каждую контрольную или управляющую цепь подсоединять к конкретной физической цепи автомобиля, причем логика работы входа или выхода жестко определена прошивкой системы.
Рассмотрим пример – подключение датчиков открытия дверей. На старых автомобилях концевики дверей сводились в одну точку, замыкая лампу подсветки салона на «массу» или подавая на нее «плюс» — соответственно, достаточно было подсоединить к ним «минусовой» или «плюсовой» вход концевиков дверей от сигнализации. На более сложных автомобилях концевики уже идут с отдельными проводами до контроллера бортовых цепей или бортового компьютера, приходится собирать диодную развязку, врезая часть диодов в штатную проводку, чтобы штатная электроника не «сошла с ума».
Теперь добавим к системе автозапуск – после остановки двигателя нам уже придется заставлять автомобиль правильно «засыпать», иначе у нас, например, останется включенной магнитола. Значит, нам потребуется в большинстве случаев имитировать открытие и закрытие водительской двери – именно к этому событию в штатной проводке привязывается «засыпание». Для этого мы используем программируемый дополнительный канал, не забывая, что подключать его придется в правильное место относительно развязывающих диодов, иначе сигнализация после глушения двигателя начнет включать тревогу.
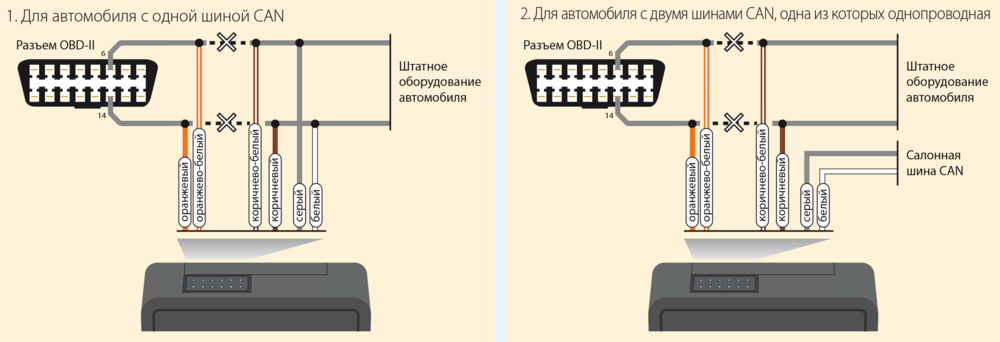
Но в то же время сейчас уже и на бюджетных моделях есть CAN-шина, которая позволяет считывать с нее диагностические данные и управлять исполнительными механизмами – например, теми же замками дверей. Установив в сигнализацию модуль КАН-шины, мы сможем получать нужные данные о состоянии автомобиля и по возможности управлять им, подсоединив всего два или четыре провода (зависит от архитектуры проводки – либо мы подключаемся только к одной шине, либо раздельно к шинам двигателя и кузова).
При этом CAN-модуль имеет собственную прошивку, что позволяет легко адаптировать автосигнализацию к разным машинам, не затрагивая прошивку самого центрального блока, который остается универсальным для всех моделей машин. Такая сигнализация станет гораздо более гибкой в настройке, сможет лучше адаптироваться к особенностям конкретной модели авто.
Что такое CAN-шина
Электронный КАН-интерфейс в авто представляет собой сеть контроллеров, использующихся для объединения всех управляющих модулей в единую систему.
Данный интерфейс представляет собой колодку, с которой можно соединять посредством проводов блоки:
- противоугонного комплекса, оборудованного функцией автозапуска либо без нее;
- системы управления мотором машины;
- антиблокировочного узла;
- системы безопасности, в частности, подушек;
- управления автоматической коробкой передач;
- контрольного щитка и т. д.
Устройство и где находится шина
Конструктивно CAN-шина представляет собой блок, выполненный в пластиковом корпусе, либо разъем для подсоединения кабелей. Цифровой интерфейс состоит из нескольких проводников, которые называются CAN. Для подключения блоков и устройств используется один кабель.
Место монтажа устройства зависит от модели транспортного средства. Обычно этот нюанс указывается в сервисном руководстве. СAN-шина устанавливается в салоне автомобиля, под контрольным щитком, иногда может располагаться в подкапотном пространстве.
Как работает?
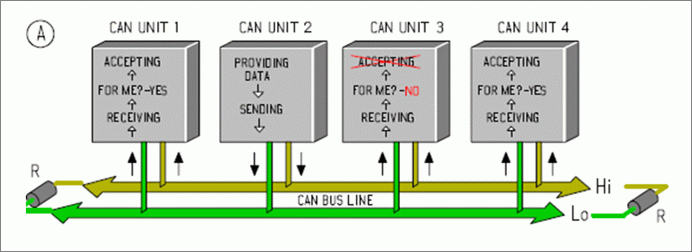
Принцип работы автоматической системы заключается в передаче закодированных сообщений. В каждом из них имеется специальный идентификатор, являющийся уникальным. К примеру, «температура силового агрегата составляет 100 градусов» или «скорость движения машины 60 км/ч». При передаче сообщений все электронные модули будут получать соответствующую информацию, которая проверяется идентификаторами. Когда данные, передающиеся между устройствами, имеют отношение к конкретному блоку, то они обрабатываются, если нет — игнорируются.
Длина идентификатора CAN-шины может составить 11 либо 29 бит.
Каждый передатчик информации одновременно выполняет считывание данных, передающихся в интерфейс. Устройство с более низким приоритетом должно отпустить шину, поскольку доминантный уровень с высоким показателем искажает его передачу. Одновременно пакет с повышенным значением остается нетронутым. Передатчик, который потерял связь, спустя определенное время ее восстанавливает.
Интерфейс, подключенный к сигналке или модулю автоматического запуска, может функционировать в разных режимах:
- Фоновый, который называется спящим или автономным. Когда он запущен, все основные системы машины отключены. Но при этом на цифровой интерфейс поступает питание от электросети. Величина напряжения минимальная, что позволяет предотвратить разряд аккумуляторной батареи.
- Режим запуска или пробуждения. Он начинает функционировать, когда водитель вставляет ключ в замок и проворачивает его для активации зажигания. Если машина оборудована кнопкой Старт/Стоп, это происходит при ее нажатии. Выполняется активация опции стабилизации напряжения. Питание подается на контроллеры и датчики.
- Активный. При активации этого режима процедура обмена данными осуществляется между регуляторами и исполнительными устройствами. Параметр напряжения в цепи увеличивается, поскольку интерфейс может потреблять до 85 мА тока.
- Деактивация или засыпание. Когда силовой агрегат останавливается, все системы и узлы, подключенные к шине CAN, перестают функционировать. Выполняется их деактивация от электрической сети транспортного средства.
Характеристики
Технические свойства цифрового интерфейса:
- общее значение скорости передачи информации составляет около 1 Мб/с;
- при отправке данных между блоками управления различными системами этот показатель уменьшается до 500 кб/с;
- скорость передачи информации в интерфейсе типа «Комфорт» — всегда 100 кб/с.
Канал «Электротехника и электроника для программистов» рассказал о принципе отправки пакетных данных, а также о характеристиках цифровых адаптеров.