Что такое модуль CAN и для чего он нужен?
Слово CAN в переводе с английского языка означает «контроллерная сеть». По своему устройству этот механизм позволяет соединить многочисленные датчики и контроллеры в единую сеть. В практике передача информации при использовании механизма CAN осуществляется посредством радиоканала или оптоволоконной линии. Но все же большее применение получает способ передачи информации посредством так называемой шины. Устройство Кан обеспечивает непрерывную работу охранной системы автомобиля. Для каждой модели автомобильного транспорта такой механизм является сугубо индивидуальным и программируется в процессе производства.
Этот модуль является необходимым механизмом при установке автосигнализации. Его возможности позволяют корректировать работу всего охранного комплекса. На сегодняшний день модуль Кан устанавливается не на все марки транспортных средств.
Модуль Can – это цифровой адаптер, который предназначен для получения, контроля и чтения цифровых сигналов, поступающих от специальной шины транспортного средства. Наличие такого модуля в системе сигнализации обеспечивает преобразование поступающей информации в цифровой формат. При установке этого механизма вмешательство в целостность работы проводки машины практически невозможно, а также исключается возможность несанкционированного подключения к центральному запирающему устройству. На сегодняшний день на некоторых марках автомобиля нельзя открыть дверь без применения модуля Кан.
На видео – о работе сигнализации с Кан шиной:
Техническая характеристика модуля CAN
Изначально механизм Кан был изобретен компанией Bosch в 80-е годы прошлого столетия. На сегодняшний день это оборудование усовершенствовано и позволяет передавать информацию не по физическим соединительным линиям, а посредством радиоволновых и оптоволоконных частот. При создании сети на основе этого механизма, подключение осуществляется по типу шина в виде дифференциальной пары.
Благодаря техническим достижениям, при подключении систем на основе механизма CAN по типу шины, используются не условные обозначения 0 и 1, а понятие рецессивный и доминантный бит. При передаче информации доминантный бит должен всегда подавлять рецессивный бит. При такой схеме работоспособность устройств сигнализации будет высока и эффективна. Поступающая информация условно разделяется на кадры. В системе, оснащенной модулем Кан, можно выделить следующие кадры:
- Передачи данных (data frame);
- Подачи запроса на идентификатор (remote frame);
- Перезагрузки системы (overload frame);
- Ошибочный (error frame).
Все сетевые узлы в системе, укомплектованной модулем Can, должны работать с одинаковой скоростью. При наличии в механизме встроенного микроконтроллера, диапазон скорости может изменяться от 20 Кбит до 1 Мбит в секунду. Информация передается по специальным электронным протоколам. Наиболее распространенными сетевыми протоколами на сегодняшний день являются:
- CAN Kingdom;
- J1939;
- CANopen;
- DeviceNet;
- SDS.

Преимущества и недостатки использования модульного механизма CAN
К преимуществам установки систем, созданных на базе модульного механизма CAN, можно отнести следующие:
- Возможность эффективной и высококачественной работы системы в режиме онлайн;
- Простоту установки, настройки и использования;
- Приемлемую себестоимость оборудования;
- Высокую устойчивость к воздействию помех на радиоканал;
- Доступ к сети осуществляется без потери пропускной способности;
- Функционирование контролирующих механизмов обеспечивает выявление ошибок в работе линии и их исправление;
- Наличие различных скоростных режимов работы.
К недостаткам использования вышеуказанных защитных линий относятся:
- Длина сети является обратно пропорциональной скорости передачи информации;
- По отношению к полезным данным в системе содержится пакет данных большого размера;
- Отсутствие общепринятых стандартов по использованию протоколов.
Программная настройка «от и до»
Настраивать сам модуль можно, не подключая его к «внешней» сигнализации никак. Он будет работать исправно. Помните, что одна из кнопок в машине является сервисной. Подробности есть в документации can_osob. В крайнем случае, можно подключить дополнительную кнопку (вход 9). Дальнейшие действия рассмотрены в следующей главе.
Что менять, а что – нет
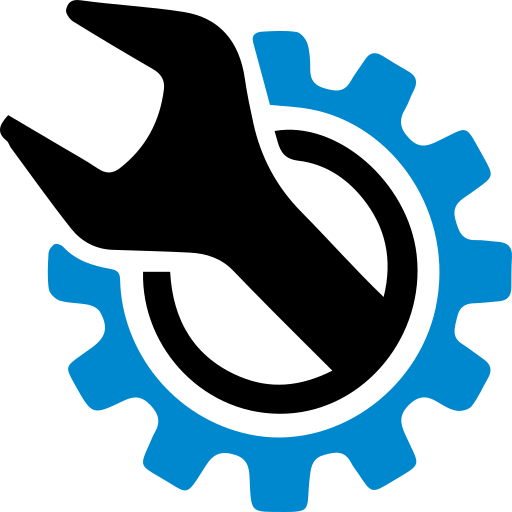
Если есть опыт в подключении и настройке любой сигнализации, пусть даже квартирной, то проблем в ходе программирования модуля не будет тоже: все опции здесь собраны в двух таблицах, а число значений как правило равно двум. Обе таблицы приведены на рисунке ниже:

Все опции, задаваемые программно
Опция 1 – это номер подгруппы автомобиля. Задавать значение нужно, если оно не было распознано на подготовительном этапе. Функцию 2, так же как последующие девять функций, нет смысла настраивать – по умолчанию все задано оптимально. Расшифровка значений для функции 2 приводится дальше.
Три варианта предустановленных настроек
Блокировку изменений (опция 11) вначале лучше не задействовать. Поговорим только о том, что такое импульсное и статусное управление. В действительности есть две сигнализации: штатная и работающая совместно с модулем. Управление будет вести вторая сигнализация, то есть та, которую устанавливают. Она переводит модуль в один из двух режимов: охрана, снято с охраны. При этом штатной автосигнализации по CAN-шине будет подаваться команда: включить или отключить охрану, закрыть или отпереть замки. Чтобы использовать только вторую группу команд (с замками), присвойте опции 16 значение 2.
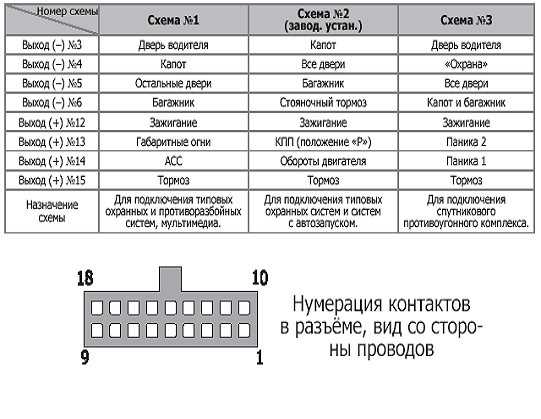
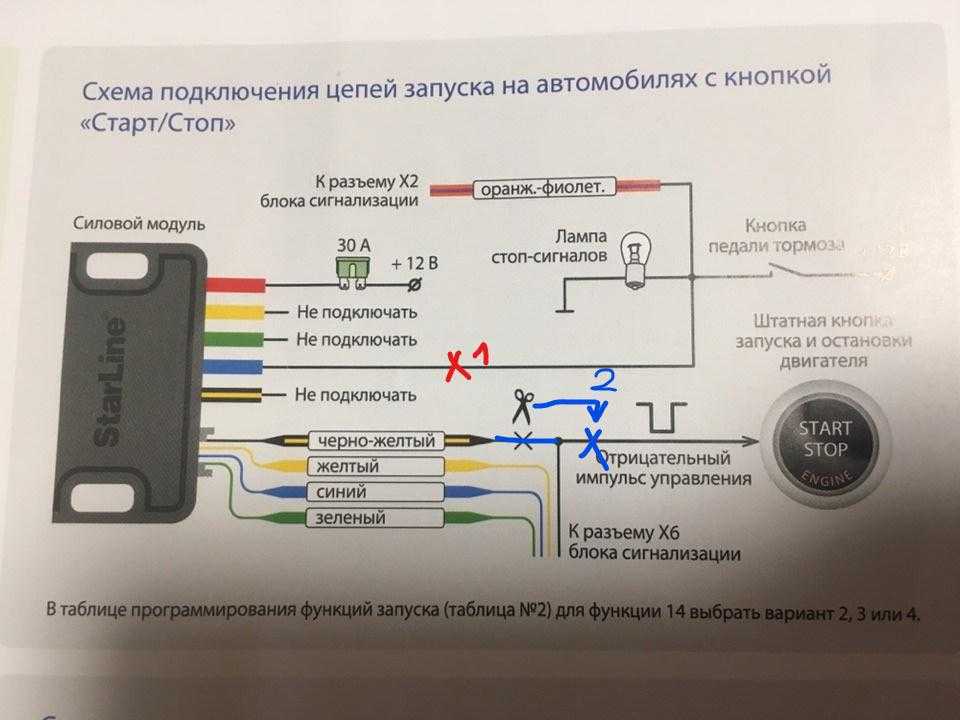
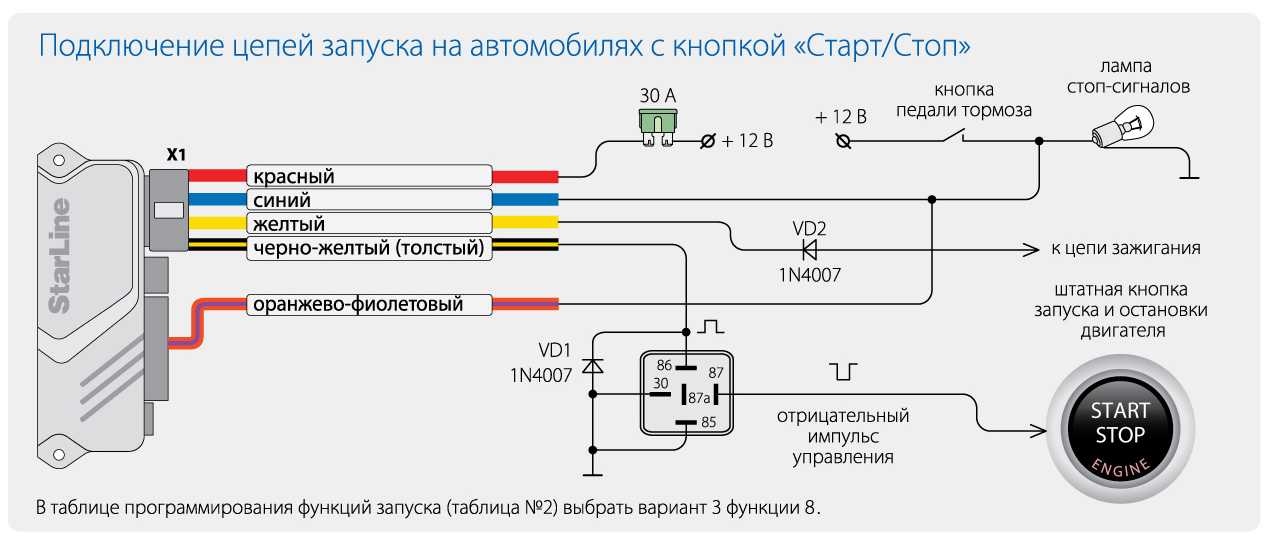
Рассмотрим, как работает импульсное управление. На вход 17 нужно подать короткий импульс, и тогда режим охраны выключится. Чтобы включить его, импульс подают на 18-й контакт. А вот статусное управление выглядит по-другому: к 18-й клемме подключают один шнур, идущий от монтируемой сигнализации. Когда на шнуре есть потенциал «массы», охрана включена. И наоборот. Видите, как все просто.
Реализация импульсного управления, схема
Как получить доступ к таблицам
Убедитесь в том, что перед выполнением настройки на клемме 10 присутствует напряжение питания. Зажигание должно быть выключено
Еще уделите внимание тому, как выполнено подключение к «массе»
Для надежной работы совместно с CAN-шиной это будет важно. Лучше использовать штатную шпильку, к которой подключается «приборка»
Лучше использовать штатную шпильку, к которой подключается «приборка».
Процедура настройки выглядит тривиально:
- Включите зажигание;
- Не позднее, чем через 10 секунд после шага 1 сервисную кнопку нажимают 10 раз – так получают доступ к первой таблице;
- Для доступа к таблице 2 кнопку нажимают не 10, а 12 раз;
- Модуль должен издать три либо четыре сигнала, что соответствует таблице 1 или таблице 2;
- Номер опции выбирают нажатиями на кнопку, затем следуют сигналы, число которых равно выбираемому номеру;
- Чтобы изменить значение опции, нажимают на педаль тормоза, а на кнопку затем нажимают требуемое число раз (см. ниже);
- Педаль тормоза отпускают, дожидаются выхода из режима настроек, но можно снова перейти к пункту 4.
Число нажатий, выполняемых на шаге 6, вычисляется так: если задано значение 1, а нужно установить 3, кнопку нажимают два раза. Если задано 3, а максимальное значение равно 4-м, то для перевода системы к значению 1 кнопку тоже нажимают дважды.
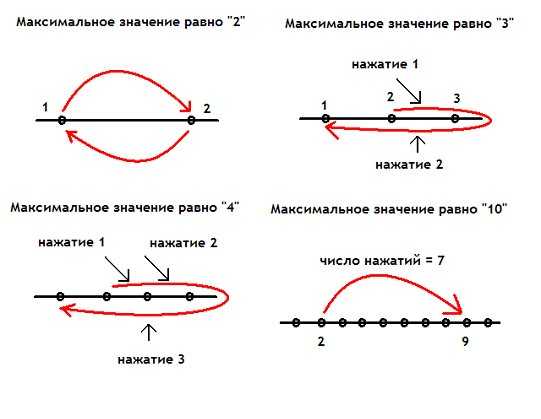
Как вычислить количество нажатий
Здесь используется «циклический выбор».
Для любой автосигнализации, даже для самой примитивной, обычно предусматривают процедуру «сброса настроек». Но разработчики модуля CAN F5 пошли несколько другим путем: для выполнения «сброса» потребуется замкнуть два контакта. Набор всех действий должен выглядеть так:
- Разрывают связь устройства с CAN-шиной, а перед этим отключают питание;
- Открывают корпус, замыкают пинцетом клеммы с надписью «RST»;
- Временно подключают питание, затем идет прерывистый звуковой сигнал;
- Отключают питание, убирают пинцет.
Клеммы, которые надо замыкать, выполнены в виде площадок на печатной плате.

Комплект под названием F5
Чтобы отрыть крышку корпуса, придется выкрутить саморезы.
Потенциальные проблемы
Так как шина находится в связи с большим количеством элементов, то некорректная работа способна приводить к негативным результатам эксплуатации. Это может сказаться не только на работоспособности авто, но и на безопасности вождения.



Сообщать о неисправности система может косвенными признаками
Водителям стоит на нее обратить внимание, в следующих случаях:
- загорелся индикатор Check Engine;
- беспричинно практически одновременно бортовой щиток засветился несколькими иконками, например, стояночный тормоз, подушки безопасности, высокое давление смазки и пр.
- считывание информации на приборной доске стало невозможным, так как не выводится информация о температуре охлаждения, уровне топлива и пр.
Необходимо заняться обязательным более точным тестирование. Квалифицированно его смогут провести на станции техобслуживания, потому что автосервисы оснащены профессиональным оборудованием.
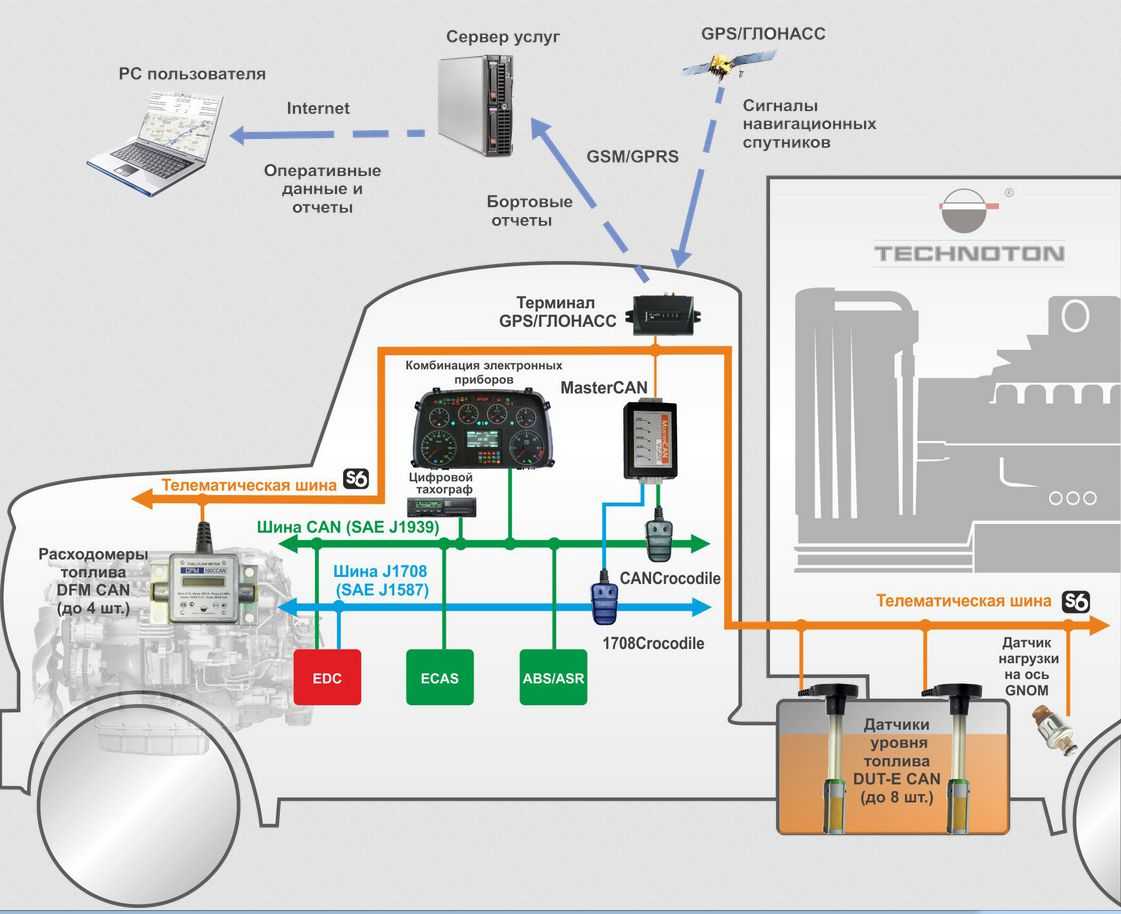
Что такое CAN-шина в автомобиле?
CAN применительно к автомобилю можно назвать «хребтом», к которому подсоединяются все электротехнические устройства. Сигналы имеют цифровой формат, а проводники к каждому контроллеру подсоединены параллельно. Благодаря этому достигается высокое быстродействие сети.
В современных автомобилях в единую сеть объединены датчики со следующих устройств:
- Мотор;
- Коробка переключения передач;
- Эирбэги (подушки безопасности);
- Антиблокировочная система;
- Усилитель рулевого управления;
- Зажигание;
- Приборная панель;
- Шины (контроллеры, определяющие уровень давления);
- «Дворники» на лобовом стекле;
- Мультимедийная система;
- Навигация (ГЛОНАСС, GPS);
- Бортовой компьютер.

Максимальная длина кабеля в CAN-шине
При скорости 1 Мбит/с максимальная длина кабеля может составлять около 40 метров. Это связано с тем, что схема арбитража требует, чтобы волновой фронт сигнала успел распространиться до самого удаленного узла и обратно. Другими словами, длина кабеля ограничена скоростью света.
Другие максимальные длины кабелей (значения приблизительны):
- 100 метров при скорости 500 кбит/с;
- 200 метров — при 250 кбит/с;
- 500 метров — при 125 кбит/с;
- 6 километров — при 10 кбит/с.
Если для обеспечения гальванической развязки используются оптопары, максимальная длина шины соответственно уменьшается.
Предыдущая запись Плохо заводится на холодную
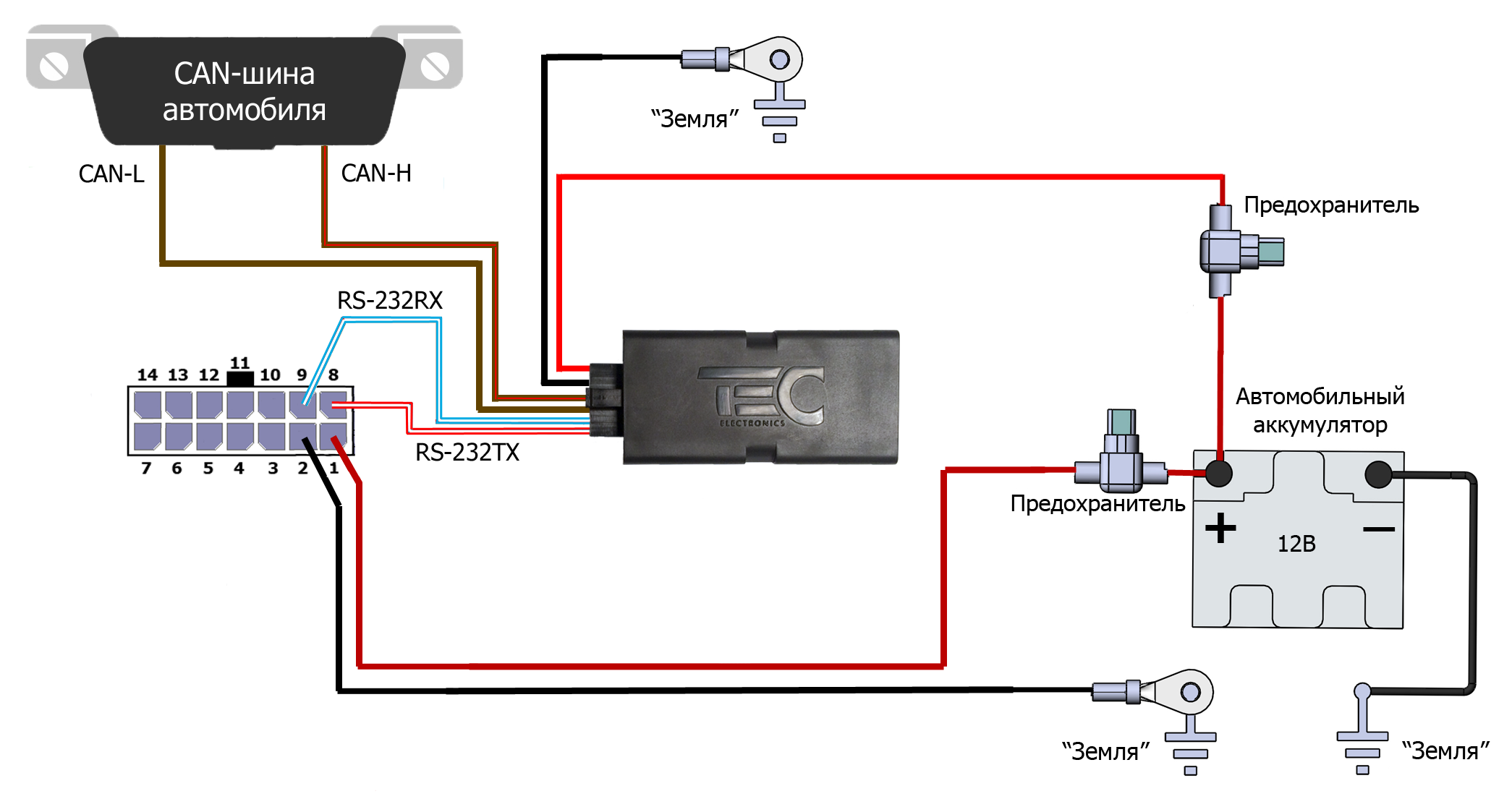
Как взламывают автомобили через CAN-шину
Первый способ взлома автомобиля – присоединение «жучка» к проводке транспортного средства
Место не так важно, главное – добраться до него. Это может быть фара, задние огни, поворотники
Нужно это только для питания и передачи команд в общую сеть. После этого один или несколько узлов выполняют команду, заданную в новом элементе сети.
Взлом авто для угона
Другой вариант – внешние сети. Иногда используется даже смартфон, если та же мультимедийная система автомобиля не имеет выхода в интернет. Достаточно связи с магнитолой через Bluetooth. Единственный недостаток этого способа – отсутствие мобильного устройства в авто, когда в нем нет водителя.
Последний вариант из используемых – перепрошивка штатного блока сигнализации. Это самый трудоемкий способ, но вредоносный код точно передастся по шине до нужного узла, а тот выполнит команду угонщиков. Так прописывается открытие дверей, запуск двигателя, включение фар. Строки из ПО удаляются, когда злоумышленники завершают свое дело. Ни один эксперт не найдет их при проверке автомобиля, когда его будут продавать на вторичном рынке по поддельным документам.
Принцип работы
Принцип работы, по которому работает анализатор шины CAN, заключается в том, что ему необходимо быстро обработать полученную информацию и вернуть ее в виде сигнала для конкретной системы. В каждом отдельном случае скорость передачи данных для систем автомобиля разная.
Параметры скорости
Основные скоростные параметры выглядят так:
- суммарная скорость передачи потоков данных по цифровой шине – 1 Мбит/с;
- скорость передачи обрабатываемой информации между блоками управления автомобиля – 500 кб/с;
- скорость, с которой система «Комфорт» получает информацию, составляет 100 кбит/с.
Особенности передачи данных
Если автосигнализация подключена к цифровой шине, информация будет поступать максимально быстро, а команды, подаваемые человеком с помощью брелока, будут выполняться точно и вовремя. Системный анализатор работает без перебоев и поэтому работа всех систем машины всегда будет в исправном состоянии.
С появлением CAN-шины и началом ее использования схема автомобильной электропроводки освободилась от определенного количества проводников, обеспечивавших связь контроллера управления между диагностическим разъемом, двигателем, мультимедиа (системы навигации с операционной системой Android) , автомобильная система защиты и т д., используя протокол KWP 2000.
Цифровая шина представляет собой полную сеть контроллеров, которые объединены в компактное устройство и могут быстро получать или передавать информацию, запускать или выключать определенные системы. Последовательный режим передачи данных делает работу системы более плавной и корректной. Шина CAN является механизмом, который имеет тип доступа Collision Resolution и этот факт необходимо учитывать при установке дополнительного оборудования.

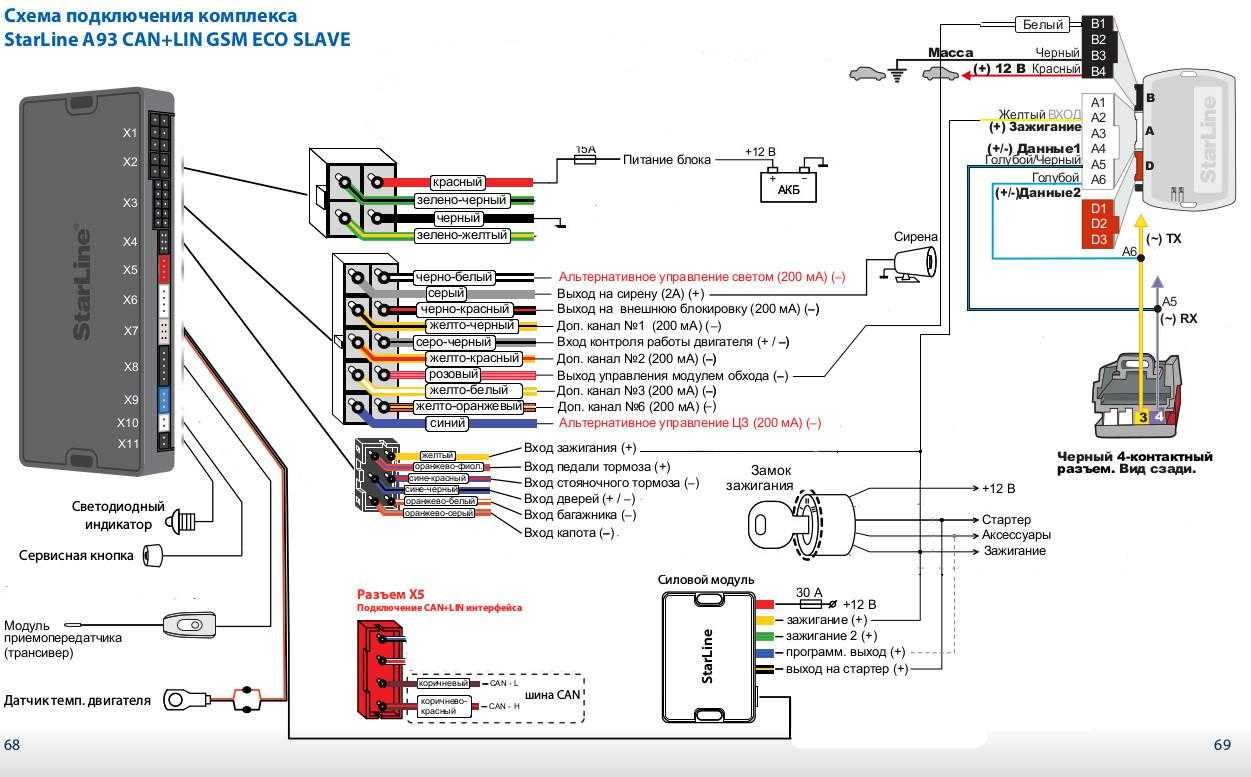
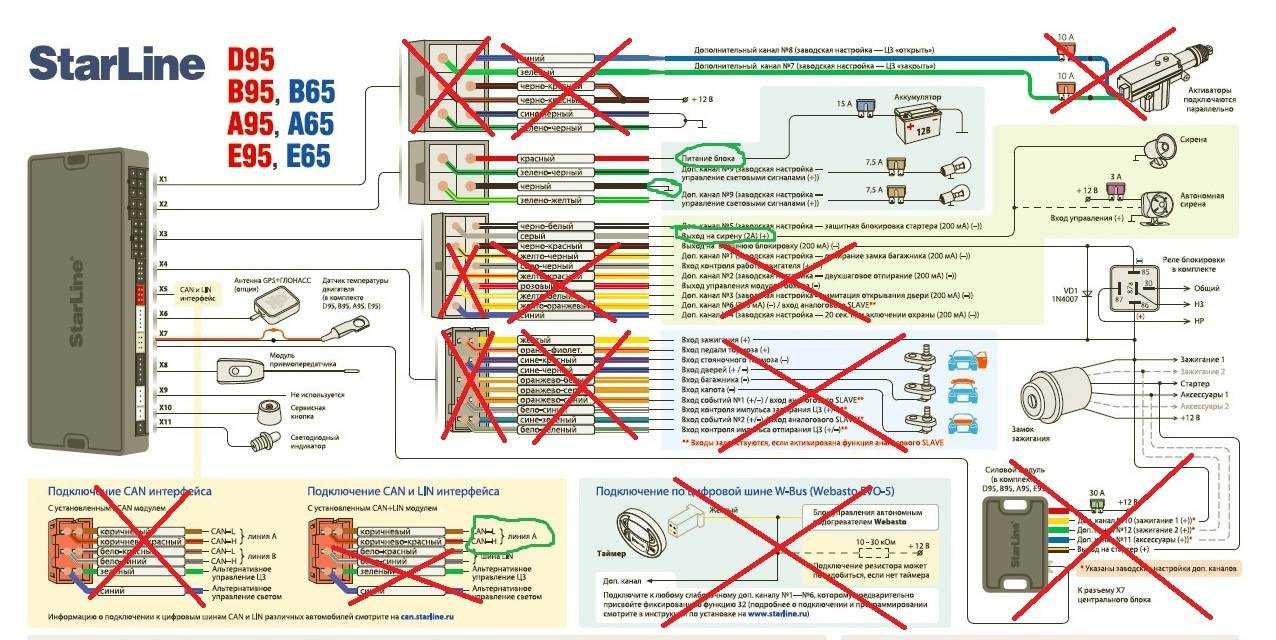
Обычно проводка CAN-шины оранжевого цвета, и они отличаются друг от друга полосами разного цвета (CAN-High — черная, CAN-Low — оранжево-серая).
При обмене информацией между любым блоком управления и с помощью приемопередатчика сигналы приема и передачи информации усиливаются до необходимого уровня.
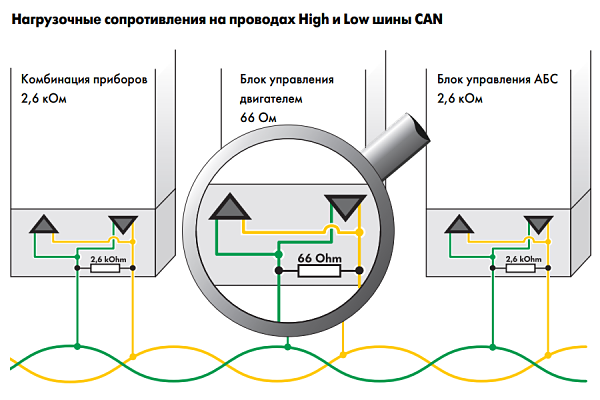
Каждый блок, подключенный к CAN-шине, имеет определенное входное сопротивление, вследствие чего формируется нагрузка CAN-модуля.
Нагрузка на центральную CAN-шину зависит от одновременного подключения и использования исполнительных механизмов и электронных блоков управления автомобиля и различных датчиков, например, сопротивление силового агрегата, подключенного к CAN-шине, составляет в среднем 68 Ом, информационно-командное Системы «КОМФОРТ-пакет» от 2,0 до 3,5 кОм. В момент деактивации всей системы деактивируется и нагрузочное сопротивление модулей, работающих через CAN-шину.
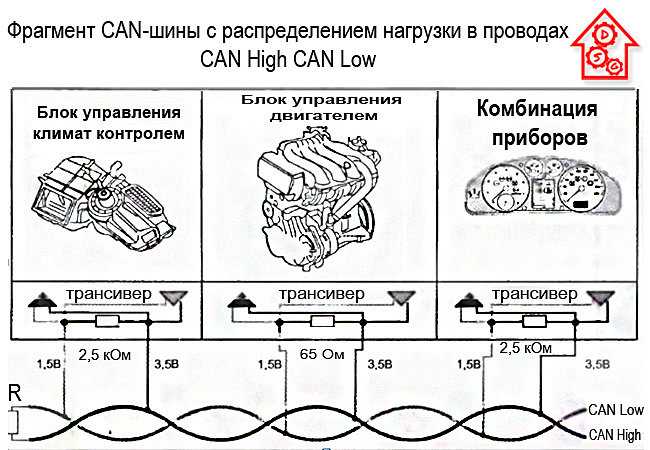
Распределение нагрузки по проводам
Блоки управления автомобильными системами помимо различных нагрузочных резисторов имеют еще и скорость передачи данных, что может быть препятствием при обработке импульсов разной природы.
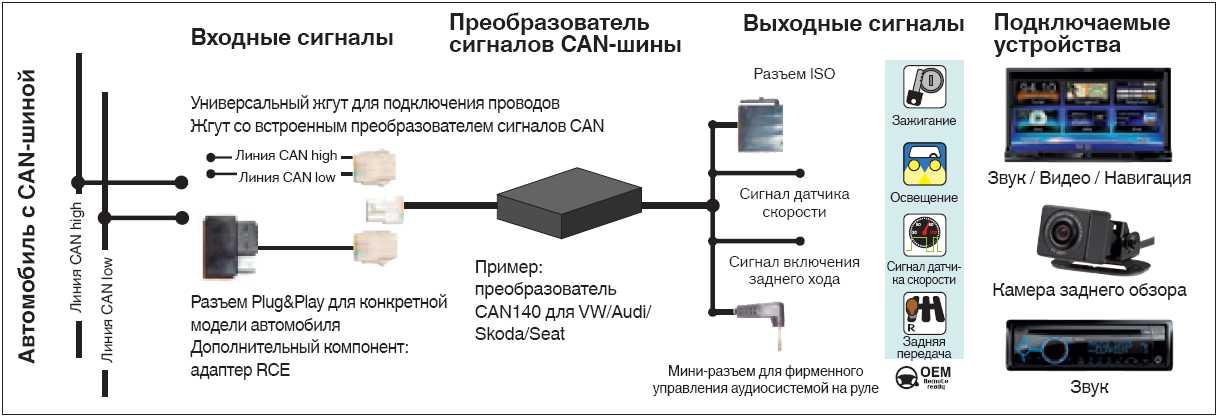
Для решения технической проблемы разнородных импульсов для связи между шинами используется шлюзовой преобразователь.
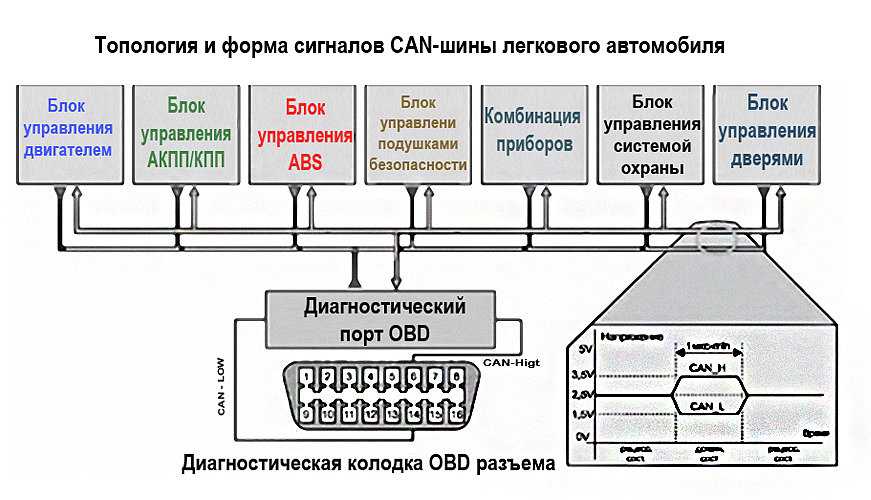
Преобразователь – это так называемый межсетевой интерфейс, в автомобиле используется в блоке управления или как самостоятельный блок и т.д. Интерфейс преобразователя используется для ввода/вывода различной информации из диагностического разъема OBD, который подводится к диагностическому разъему через определенный кабель и соединяет центральный блок управления с разъемом OBD по шине CAN.

OBD — это универсальный диагностический разъем с множеством удобств и преимуществ для сканирования автомобиля на ошибки и диагностики.
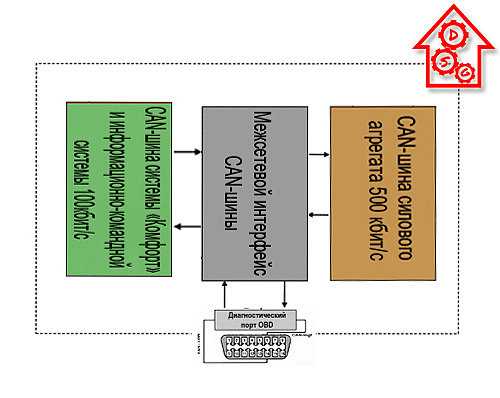
Как показано на изображении, электронные блоки CAN-шины общаются в автомобиле через разные блоки, но блок питания CAN-шины, информационно-командная система и система Комфорт делают одно и то же, в зависимости от марки автомобиля и в своем составе, единицы могут различаться, но суть идеи остается неизменной.
Виды CAN-шин
Условно CAN-шины можно разделить между собой на два типа в соответствии с использующимися идентификаторами:
- КАН2, 0А. Так маркируются цифровые устройства, которые могут функционировать в 11-битном формате обмена данными. Этот тип интерфейсов по определению не может выявить ошибки на сигналы от модулей, работающих с 29 бит.
- КАН2, 0В. Так маркируются цифровые интерфейсы, функционирующие в 11-битном формате. Но ключевая особенность состоит в том, что данные об ошибках будут передаваться на микропроцессорные устройства, если обнаруживается идентификатор на 29 бит.
CAN-шины могут делиться на три категории в соответствии с видом:
- Для силового агрегата автомобиля. Если подключить к нему такой тип интерфейса, это позволит обеспечить быструю связь между управляющими системами по дополнительному каналу. Предназначение шины заключается в синхронизации работы ЭБУ двигателя с другими узлами. Например, коробкой передач, антиблокировочной системой и т. д.
- Устройства типа Комфорт. Такая разновидность цифровых интерфейсов используется для соединения всех систем данной категории. К примеру, электронной регулировки зеркал, подогрева сидений и т. д.
- Информационно-командные интерфейсы. Имеют аналогичную скорость передачи информации. Используются для обеспечения качественной связи между узлами, необходимыми для обслуживания транспортного средства. К примеру, между электронным блоком управления и навигационной системой или смартфоном.
О принципе действия, а также о разновидностях цифровых интерфейсов рассказал канал «Электротехника и электроника для программистов».
Работа с терминалом
Перед эксплуатацией надо учесть рекомендации по использованию, которые указываются в сервисном руководстве. Предварительно производится настройка устройства.
Варианты настройки
Если используется терминал, есть два варианта настроить работу интерфейса:
- С помощью специальной программы «Конфигуратор» для компьютера. При запуске утилиты надо перейти во вкладку «Настройки» и выбрать пункт CAN. В открывшемся окне указываются необходимые параметры.
- Используя команды «CanRegime». Обычно этот вариант применяется для дистанционной настройки с использованием СМС-сообщений. Могут применяться команды, которые отправляются из программного обеспечения для мониторинга.
Подробнее о командах, которые указываются после CanRegime:
Mode — определяет режим функционирования. Если показана цифра 0 — то цифровой интерфейс отключен, если 1 — используется стандартный фильтр. Цифры 2 и 3 указывают на принадлежность пакетов к 29- либо 11-битному классу.
BaudRate. Команда предназначена для определения скорости работы цифрового интерфейса
Важно, чтобы этот параметр соответствовал скорости передачи информации в авто.
TimeOut — определяет время ожидания для каждого сообщения. Если полученная величина слишком низкая, то цифровой интерфейс сможет отловить не все передающиеся сообщения.
Последовательность программирования
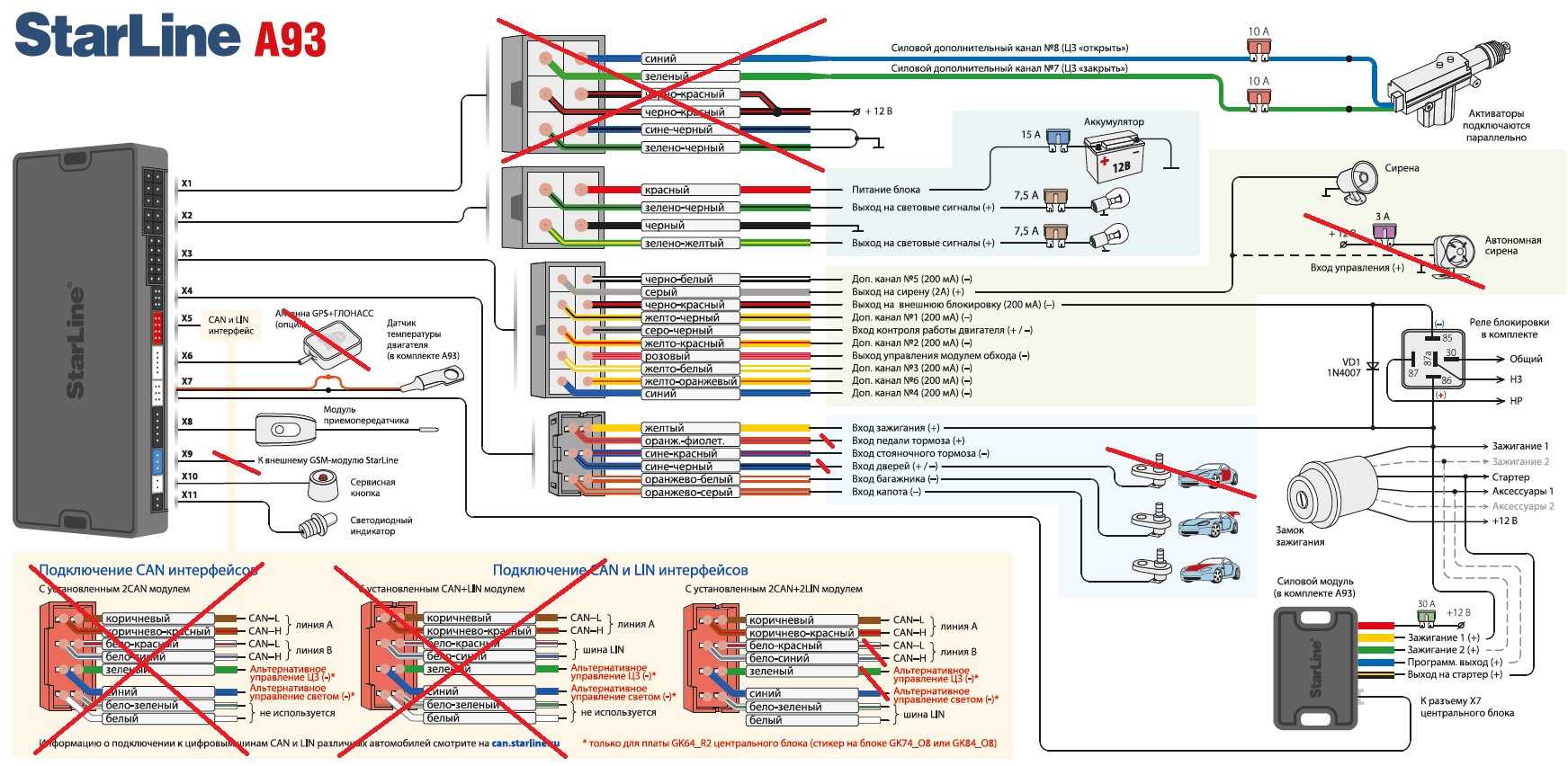
Для того, чтобы реализовать необходимые функции через цифровые шины автомобиля выполните программирование модуля:
Войдите в режим программирования
Если сервисная кнопка будет нажата число раз, превышающее количество пунктов меню программирования, то система выдаст 4 коротких звуковых сигнала и останется в основном меню программирования. Если в течении 10 секунд после входа в режим программирования не будет выбран ни один из параметров, система выдаст 4 длинных звуковых сигнала оповещения и вернется в штатный режим работы.
Для определения текущего состояния выбранного параметра дождитесь выдачи звуковых сигналов, количество которых будет соответствовать значению параметра. При необходимости можно перейти к изменению состояния параметра сразу же после его выбора, не дожидаясь сигналов оповещения о текущем состоянии.
Нажмите сервисную кнопку число раз, соответствующее значению требуемого состояния параметра. Через 2 секунды после окончания установки прозвучит серия звуковых сигналов, количество которых будет соответствовать состоянию параметра (1 звуковой сигнал — включен, 2 звуковых сигнала — отключен). Еще через 2 секунды последуют 2 коротких звуковых сигнала, означающих, что состояние параметра было успешно изменено и осуществлен переход в меню выбранного пункта.
Если сервисная кнопка будет нажата более 3 раз или если в течение 5 секунд после входа в подпункт меню значение параметра не будет установлено, то система выдаст 4 коротких звуковых сигнала и вернется в меню выбранного пункта.
Для перехода к программированию следующего параметра повторите действия, изложенные в пп.2…4, с выбором пункта меню и изменением его состояния.
Разновидности и маркировка
По типу идентификаторов такие устройства делятся на два вида:
- CAN2, 0A. Это маркировка интерфейсов, которые могут работать в 11-битном формате передачи информации. Данная разновидность устройств не в состоянии определять ошибки импульсов от блоков, которые работают с 29 бит.
- CAN2, 0B. Это маркировка шин, работающих в формате 11 бит. Основная особенность заключается в возможности передачи информации на блоки управления при выявлении 29-битного идентификатора.
В зависимости от области применения, шины разделяются на три класса:
- Для двигателя транспортного средства. При подключении шины обеспечивается максимальная скорость передачи данных и связи между управляющими устройствами. Отправка информации осуществляется по дополнительному каналу. Основное назначение состоит в синхронизации работы микропроцессорного модуля с другими системами. К примеру, антиблокировочным узлом колес, трансмиссией и т. д.
- Цифровые интерфейсы класса Комфорт. Этот класс шин предназначен для взаимодействия с любыми устройствами данного типа. Интерфейс используется для работы с системами электронного изменения положения электрозеркал, узла обогрева кресел, управления люком и т. д.
- Информационно-командные устройства. Они характеризуются аналогичной скоростью при отправке данных. Такие шины обычно применяются для связи между системами, которые требуются для обслуживания автомобиля.
Канал «Diyordie» рассказал о назначении цифрового интерфейса, а также о его разновидностях в автомобиле.
Неисправности
Поскольку CAN-интерфейс завязан со многими системами автомобиля, при поломке или некорректной работе одного из узлов в нем могут появиться неполадки. Их наличие отразится на функционировании основных агрегатов.
Признаки и причины
О появлении неисправностей могут сообщить такие «симптомы»:
- на приборной панели загорелись одновременно несколько значков без причины — подушки безопасности, рулевое управление, давление в системе смазки и т. д.;
- появился световой индикатор Check Engine;
- на контрольном щитке отсутствует информация о температуре силового агрегата, уровне топлива в баке, скорости т. д.
Причины, по которым могут возникнуть неисправности в работе CAN-интерфейса:
- обрыв проводки в одной из систем или повреждение электролиний;
- короткое замыкание в работе агрегатов на батарею или землю;
- повреждение резиновых перемычек на разъеме;
- окисление контактов, в результате чего нарушается передача сигнала между системами;
- разряд АКБ автомобиля либо падение величины напряжения в электросети, что связано с неправильным функционированием генераторной установки;
- замыкание систем CAN-high либо CAN-low;
- появление неисправностей в работе катушки зажигания.
Подробнее о поломках цифрового интерфейса и тестировании с использованием компьютера рассказал канал «KV Avtoservis».
Диагностика
Чтобы определить причину появления неполадок, потребуется тестер, рекомендуется использование мультиметра.
Процесс проверки:
- Диагностика начинается с поиска проводника витой пары КАН-шины. Кабель имеет черную либо оранжево-серую изоляцию. Первый является доминантным уровнем, а второй — второстепенным.
- С помощью мультиметра производится проверка величины напряжения на контактных элементах. При выполнении задачи зажигание нужно включить. Процедура тестирования позволит выявить напряжение в диапазоне от 0 до 11 вольт. На практике это обычно 4,5 В.
- Выполняется отключение зажигания. От аккумулятора отсоединяется проводник с отрицательным контактом, предварительно гаечным ключом надо ослабить зажим.
- Выполняется измерение параметра сопротивления между проводниками. О замыкании контактов можно узнать, если эта величина стремится к нулю. Когда диагностика показала, что сопротивление бесконечно, то в электролинии имеется обрыв. Проблема может заключаться непосредственно в контакте. Требуется более детально проверить разъем и все провода.
- На практике замыкание обычно происходит из-за поломки управляющих устройств. Для поиска вышедшего из строя модуля следует поочередно отключить от питания каждый блок и выполнить проверку величины сопротивления.
Пользователь Филат Огородников рассказал о диагностике КАН-шины с использованием осциллографа.
Технические характеристики
От эксплуатационных параметров зависит скорость взаимодействия между элементами системы, а также качество связи между ними. Чаще всего характеристики большинства современных шин имеют следующие значения:
- информация по проводной бортовой сети передается со скоростью примерно 1 Мб/с;
- в процессе обмена данными между отдельными блоками управления показатель скорости снижается до 500 кб/c;
- информация передается в интерфейсах, аналогичных «Комфорт», с невысокой скоростью – близко к 100 кб/с.
Чем новей модель автомобиля, тем прогрессивней в ней стоит разводка. При возможных неполадках придется искать аналоги.
Для чего он нужен
Как уже кратко упоминалось, современные автомобили оборудуются КАН-шиной или цифровой сеткой, объединяющей разные блоки транспортного средства. Здесь происходит кодирование и обмен сигналами между разными устройствами, а сама шина имеет вид витой пары. С ее помощью можно управлять узлами транспортного средства или считывать интересующие данные.
Зная особенности КАН шины в сигнализации, и что это в машине, несложно разобраться с назначением модуля. Многие модели охранных систем комплектуются устройством CAN, обеспечивающим быструю коммутацию со штатной системой и управлением разными девайсами в машине. При этом можно избежать множества скруток и паек в электронной системе авто. Благодаря уменьшению числа соединений, повышается надежность системы, и снижается риск потери гарантии со стороны дилера.

При рассмотрении, для чего нужен модуль для сигнализации, можно рассмотреть простой пример. Так, при постановке машины на охрану с главного блока направляется сигнал к КАН-модулю. Дальнейшие шаги зависят от заложенной программы. В этом и преимущество, ведь после единичного программирования можно не переживать о работе устройства. Оно без сбоев выполняет сервисные функции.
Адаптер принимает данные с главной шины машины, преобразует их в аналоговый и направляет на главный блок охранной системы. При этом CAN модуль программируется под определенную модель машины, что обеспечивает правильное взаимодействие со всеми системами. Появляется возможность управлять окнами, дверьми, климат-контролем, двигателем и другими узлами. Система становится более надежной.
Отметим, что CAN применяется не только в автомобильной сфере. Они используются в конвейерных линиях сборки, в медицинском оборудовании, при создании умного дома, в военных комплексах и другом оборудовании.
Приложения CAN
CAN является идеальным решением для любого приложения, где микроконтроллеры обмениваются сообщениями друг с другом и с удаленными периферийными устройствами. Изначально CAN использовался в автомобилях для обеспечения критичного по времени управления и обмена информацией между двигателем и коробкой передач при гарантированном времени ожидания сообщения и допуске каждого из участников сети к работе с текущими данными. Наряду с достаточно дорогими высокоскоростными решениями существуют и экономичные решения для подключения к сети инерционных устройств, которые работают в шкале времени сотен микросекунд (система управления дверьми, подъемник окна, управление зеркалом). При этом мощные жгуты электрических проводов заменяются двухпроводной CAN-сетью, узлами которой являются, в том числе, тормозные огни и указатели поворота.
Широкое применение CAN нашел в промышленной автоматике, где имеется большое число устройств управления, датчиков, механизмов, электроприводов и других объектов, которые связаны единым технологическим циклом (системы отопления и кондиционирования, насосы, конвейеры, лифты, эскалаторы, транспортеры и т. д.)
Важной особенностью таких систем является возможность диагностики и управления объектами, расположенными на большой территории, по адаптивным алгоритмам. В результате достигается существенное уменьшение потребляемой мощности, шума, износа оборудования
Подобная картина наблюдается и в железнодорожных бортовых системах, где решающую роль играет обмен данными между подсистемами при наборе скорости, торможении, управлении дверьми и диагностике.
Можно ли сделать анализатор своими руками?
Для выполнения этой задачи автовладелец должен иметь профессиональные навыки в области электроники:
- Сборка устройства производится по схеме, представленной на первом фото в галерее. Предварительно нужно купить все детали, необходимые для изготовления. Основным компонентов является плата STM32F103С8Т6, оснащенная контроллером. Также потребуется электрическая схема стабилизатора и CAN-трнасивер. Можно использовать устройство МСР2551 или другой аналог.
- Если требуется сделать анализатор более технологичным, в него можно добавить модуль Bluetooth. Благодаря этому автовладелец может сохранять важную информацию в память смартфона.
- Для программирования анализатора используется любое подходящее для этого программное обеспечение. Согласно отзывам, оптимальный вариант — утилиты Arduino или CANHacker. Во второй утилите есть больше опций и имеется функция фильтрации информации.
- Чтобы произвести прошивку, понадобится преобразователь USB-TTL. Это устройство требуется для отладки, при его отсутствии можно использовать ST-Link.
- После загрузки утилиты на компьютер основной файл с расширением ЕХЕ прошивается в блок с применением программатора. Если процедура выполнена успешно, то надо дополнительно установить перемычку на Bootloader. Собранное устройство надо синхронизировать с компьютером, используя USB-провод.
- Следующим этапом будет добавление прошивки в анализатор. Для выполнения задачи потребуется утилита MPHIDFlash.
- После успешного обновления программы кабель от компьютера отключается и снимается перемычка. Выполняется установка драйверов. Если сборка выполнена корректно, то при подключении к ПК анализатор будет определяться в качестве СОМ-порта.
Фотогалерея
Фото схем для самостоятельного изготовления анализатора приведены в этом разделе.
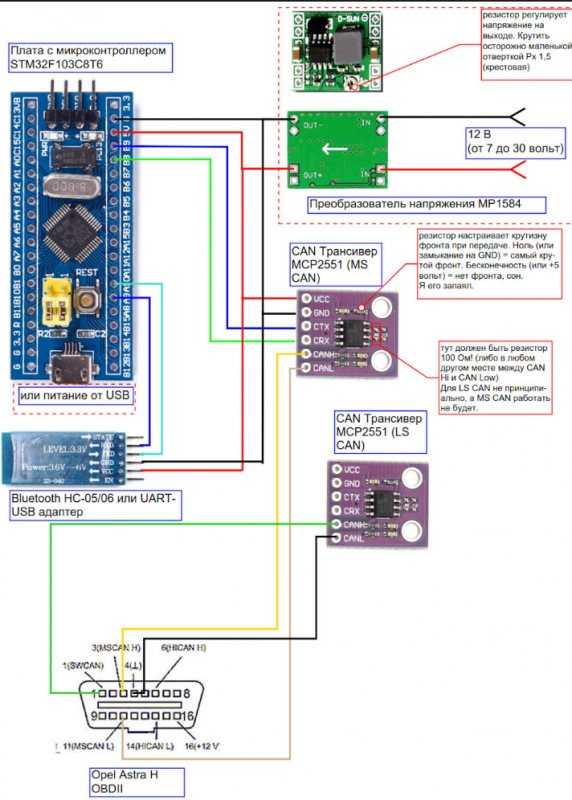
Общая схема для сборки анализаторного устройства
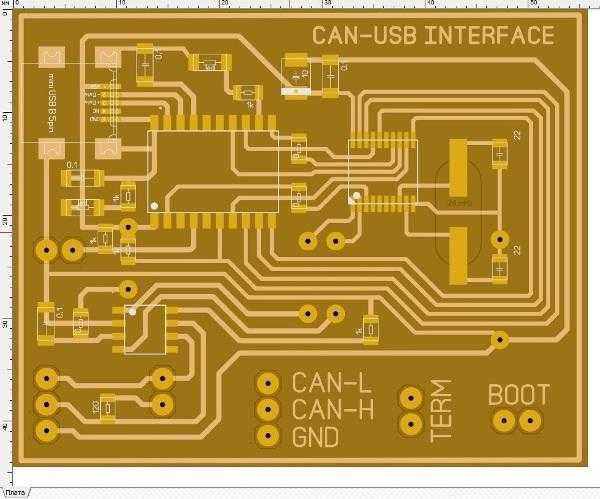
Плата, использующаяся в качестве основы